We live in a three dimensional space. This means it is possible to point in three perpendicular directions: forward, right and up. Or in mathematical terms, these directions form the three axes x, y and z. Then, any point in space can be described by a triplet of three coordinates (x, y, z), called a vector. With a set of coordinates it is not only possible to describe any position in space, but one can also describe directions, by imagining an arrow pointing from the origin (0, 0, 0) to (x, y, z). Furthermore, these vectors can be used to calculate other vectors and useful quantities by adding, subtracting and multiplying them.
However, there is nothing stopping us from imagining a mathematical world of higher dimensions. For instance, in a four dimensional world, it would be possible to point in four perpendicular directions: forward, right, up and a direction I will call ana. The opposite direction of ana is called kata. These words come from Greek and mean "up" and "down" respectively. The fourth axis associated with the direction ana/kata I will call the w axis.
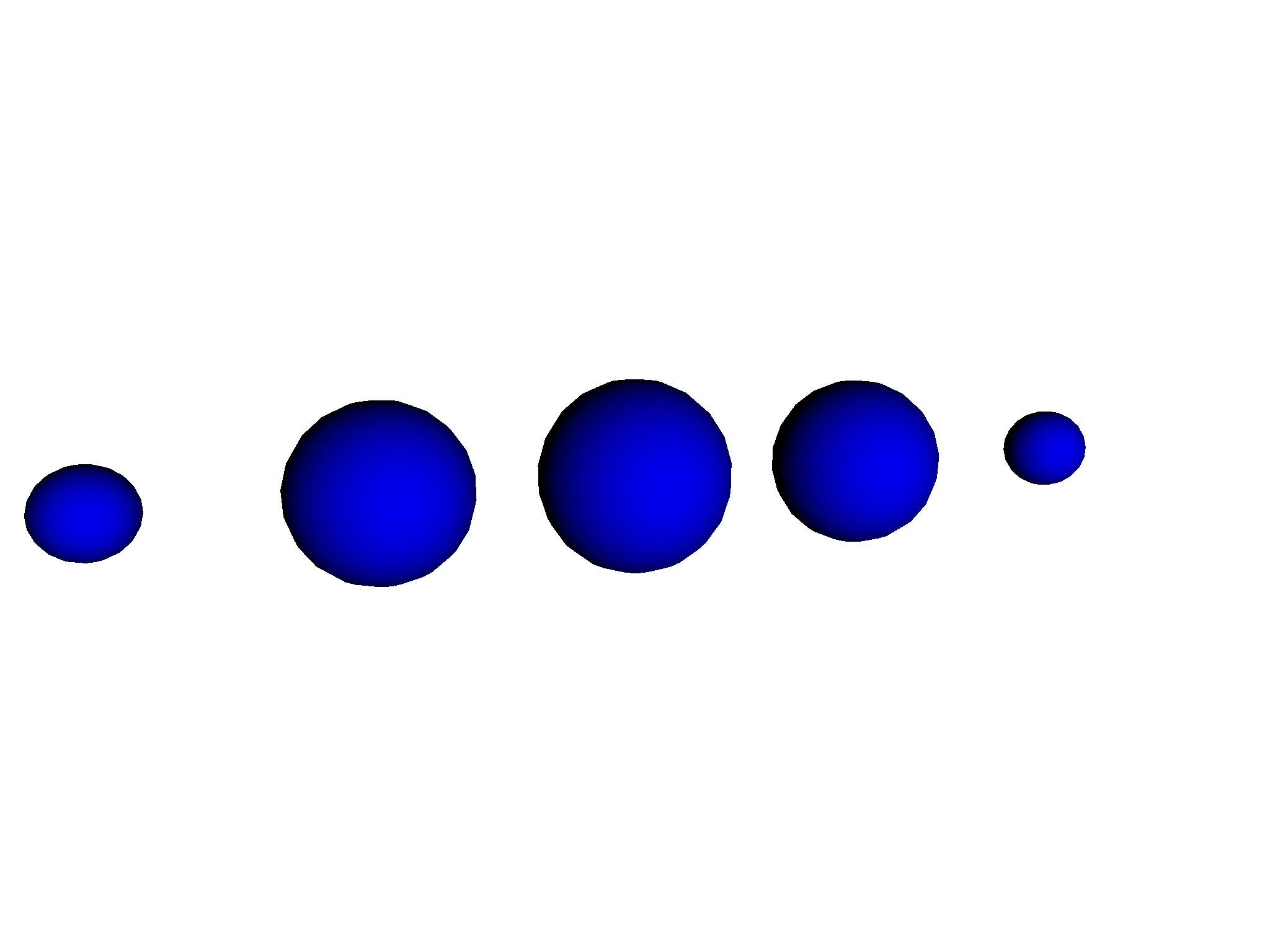
You might think it is impossible to visualize this world, but you would be wrong. There are several possible methods to visualize higher dimensions. It is easiest to see this by analogy, by trying to visualize three dimensions using only two. One method is to just discard the extra dimension and only look at cross sections. In case of a sphere, you would see a series of growing and shrinking circles. In case of a cube, you would either just see squares (when crossing face first), or a series of wider and wider rectangles (when crossing edge first), or more interestingly a triangle morphing into a hexagon and back to a triangle (when crossing vertex first).
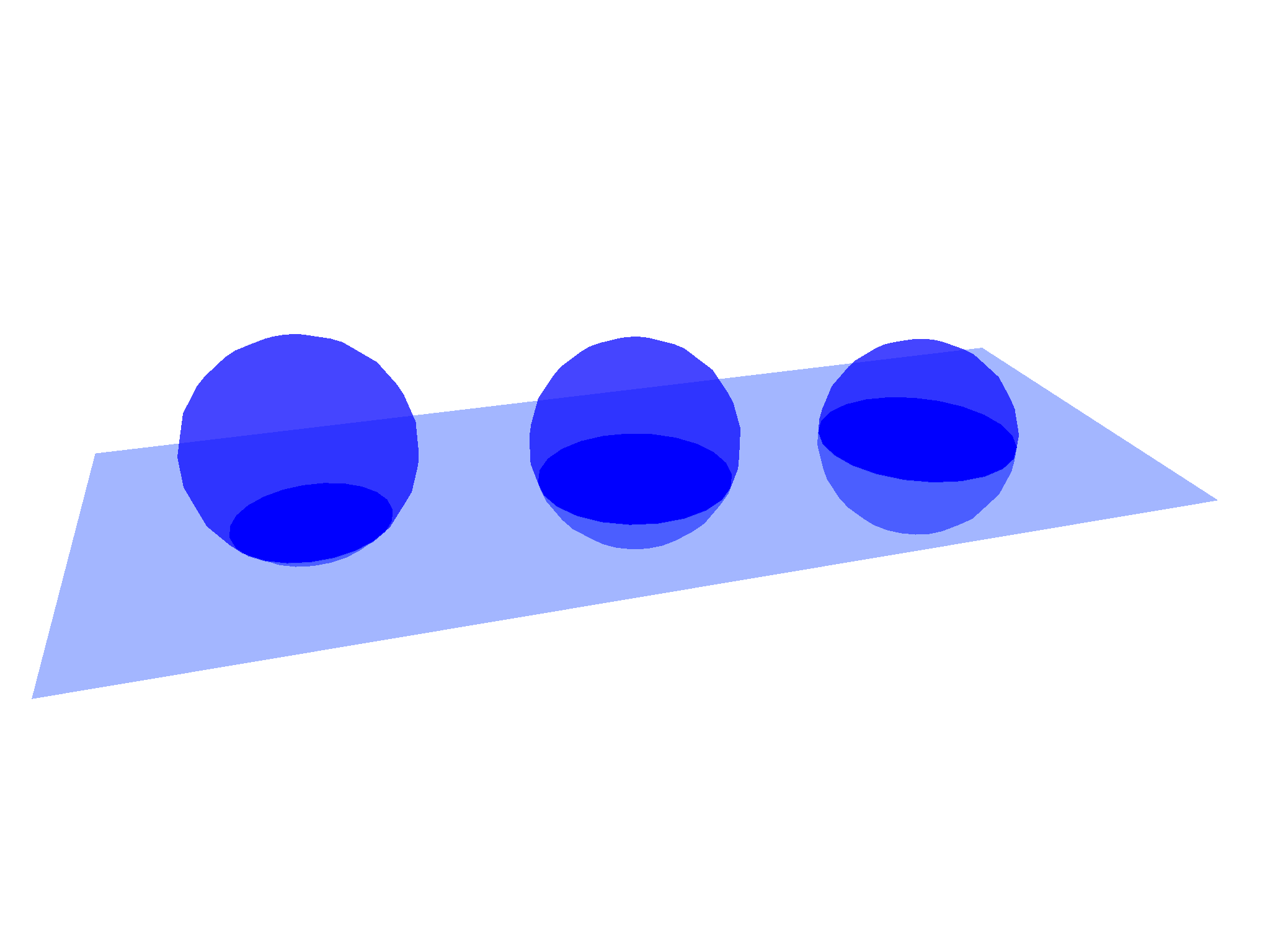
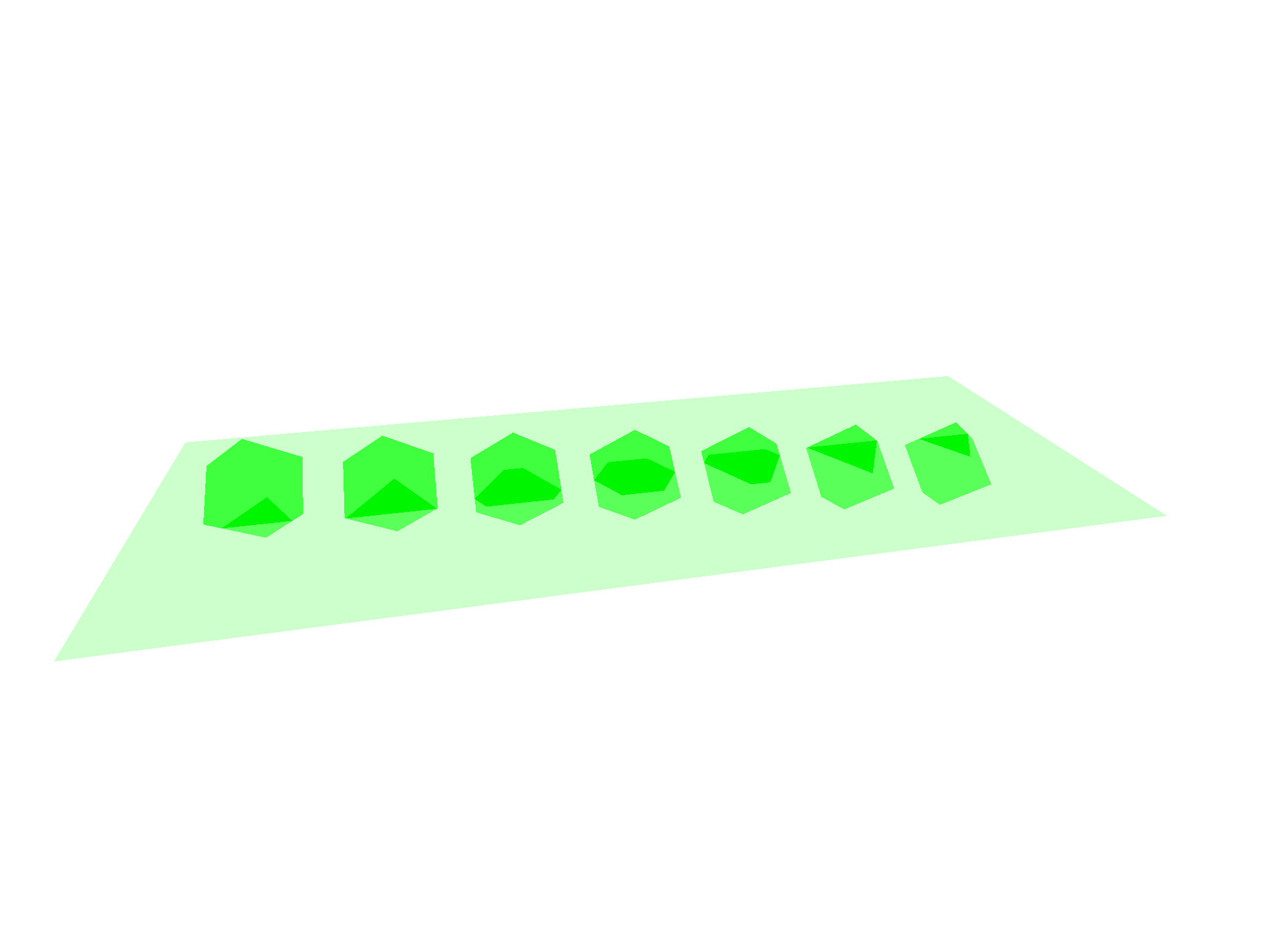
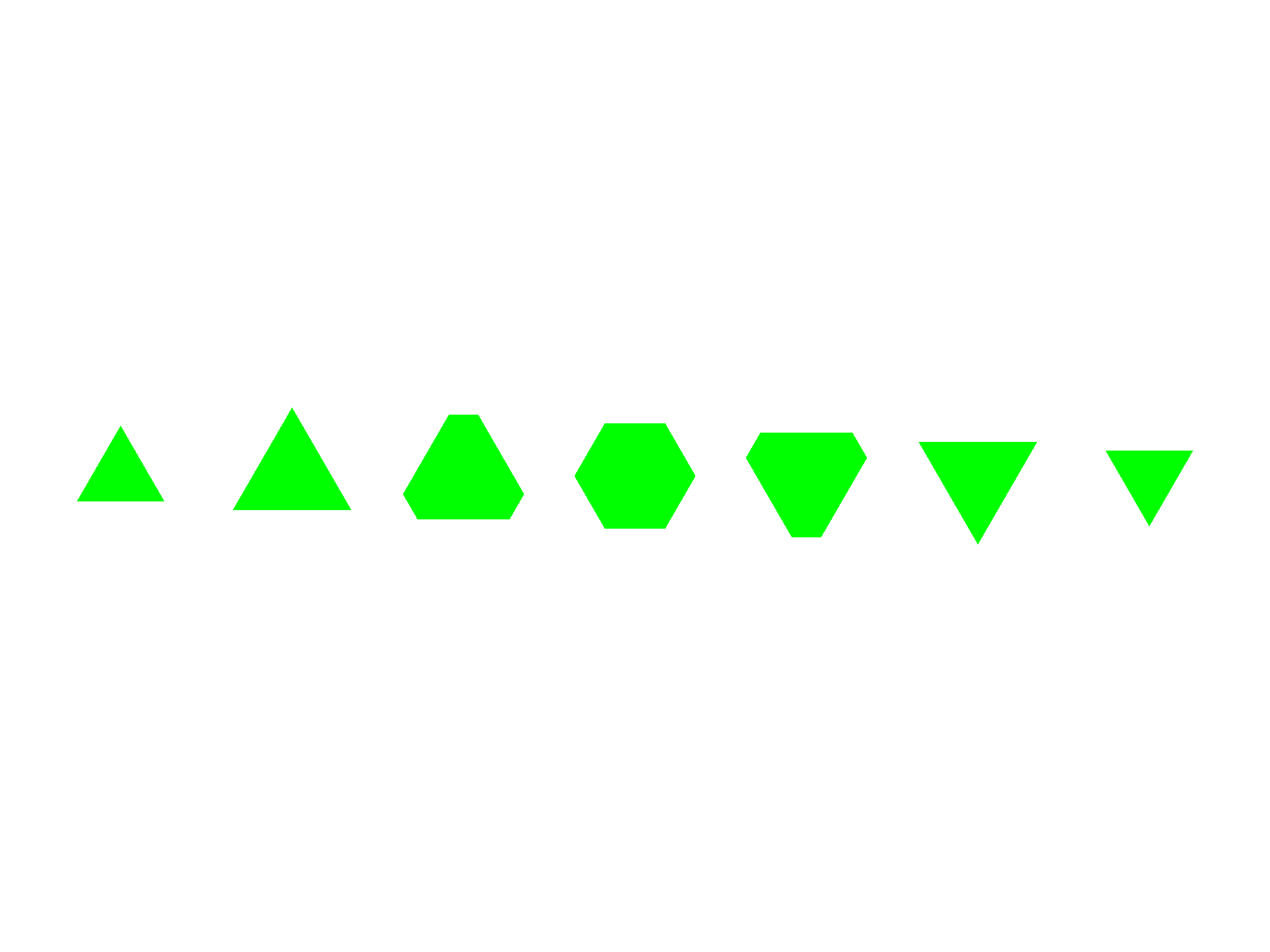
This means the four dimensional equivalent of the sphere will look like a series of growing and shrinking spheres, while a four dimensional cube will in the simplest case look like a series of identical cubes and will morph in more and more interesting ways, depending on the angle of descent.
However, although I have done it in the past, it is quite complicated to calculate these cross sections and I did not create any images of these more elaborate cross sections. Maybe I will create them in the future.
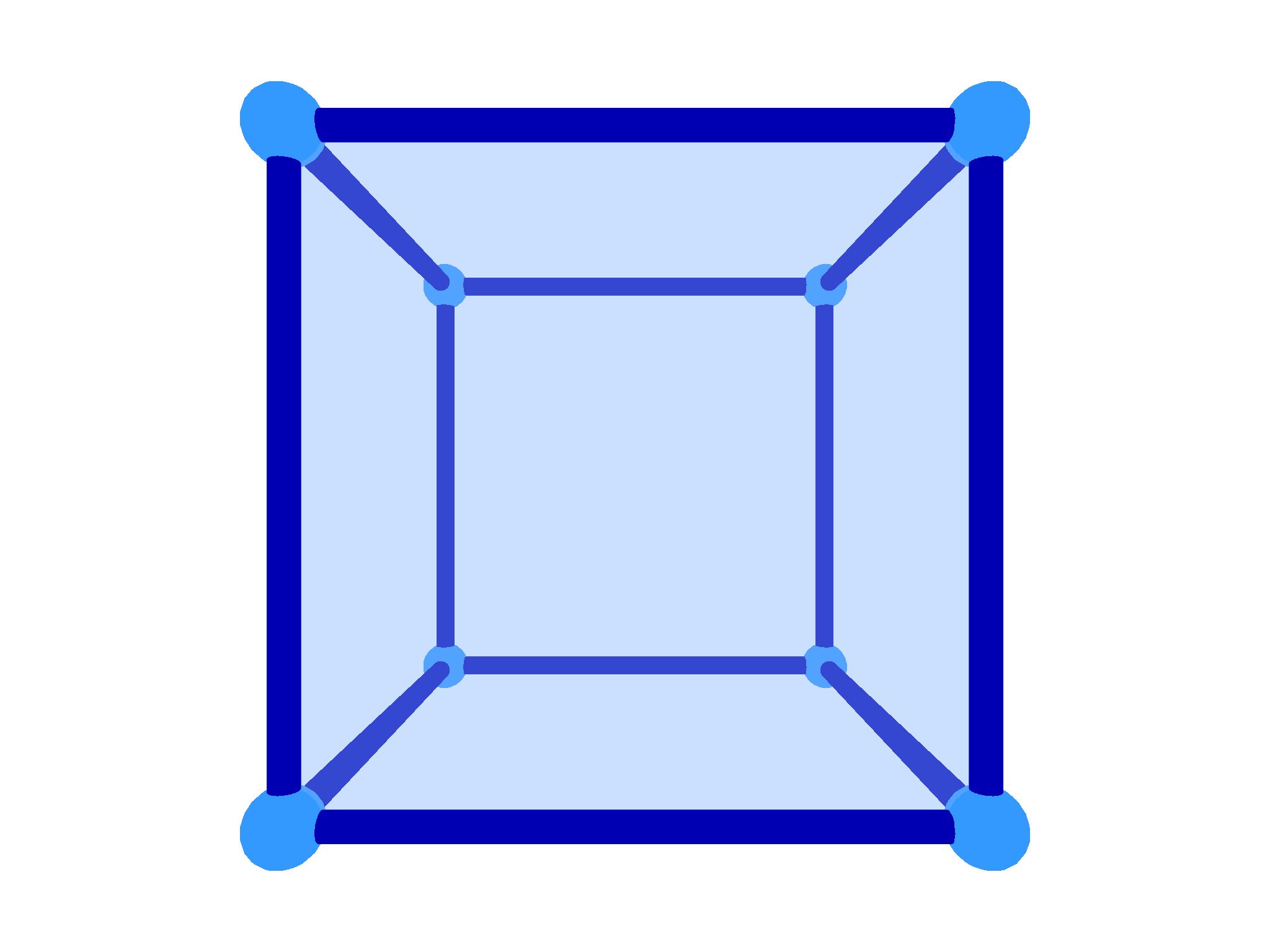
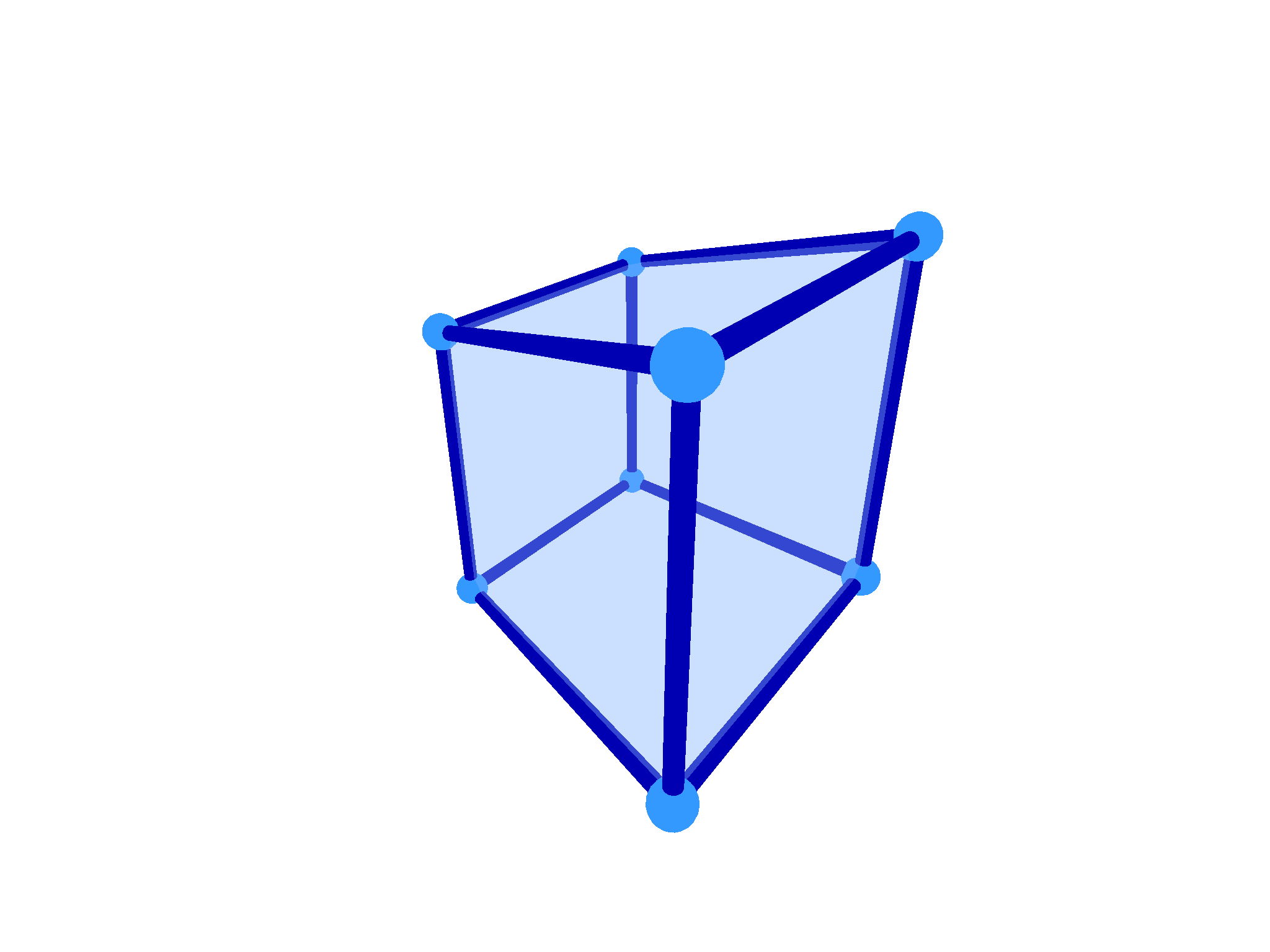
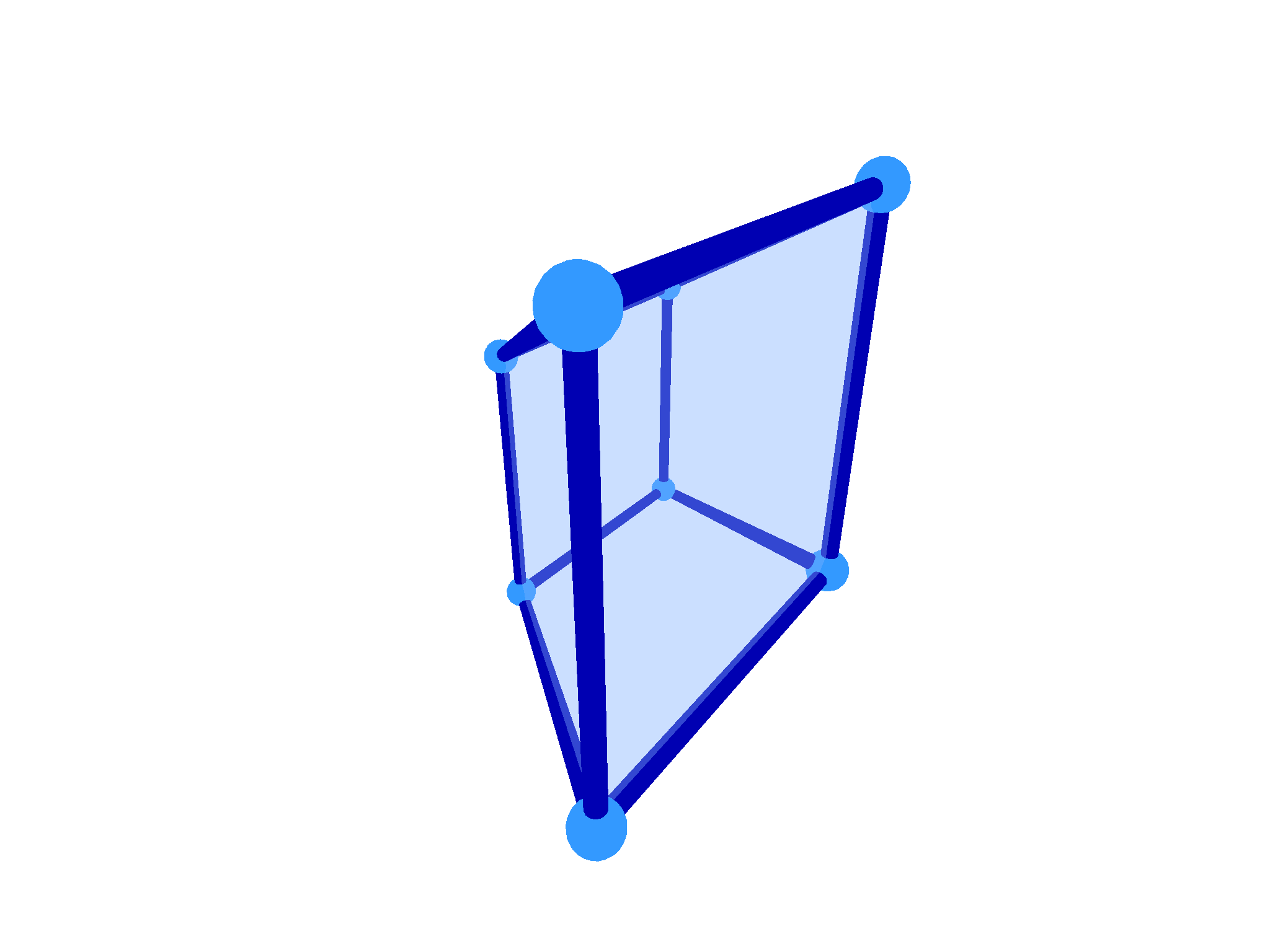
Anyway, the point I want to make is that there exists a much nicer way to visualize higher dimensional shapes: projection. We actually use the same principle when we are looking into our 3d world, since our eyes only capture a 2d image. Well, actually two 2d images, which our brain merges to give us a sense of depth. But that is still only a 2d image, just with an additional depth value at each (x,y) point in our vision, aside from color.
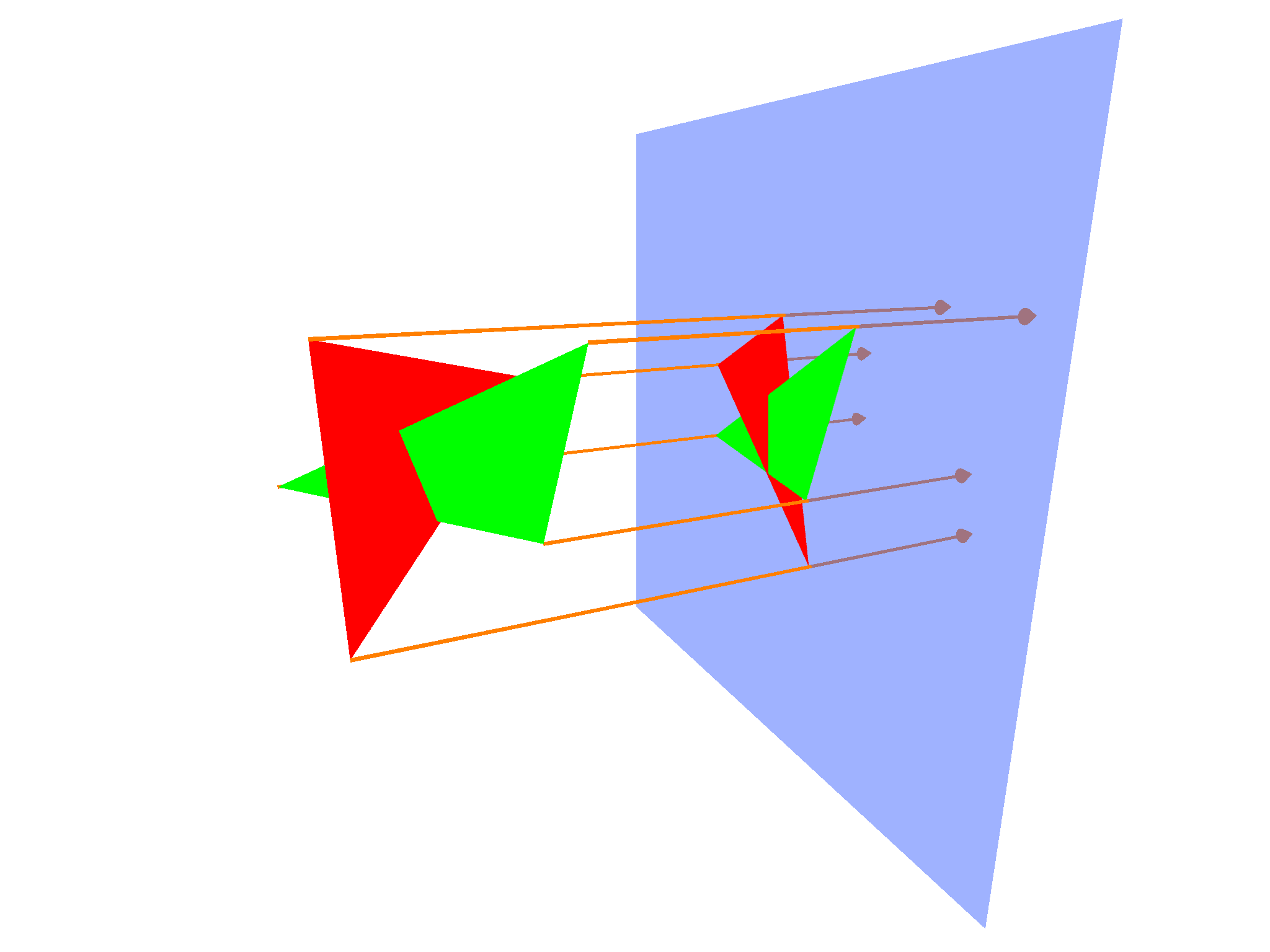
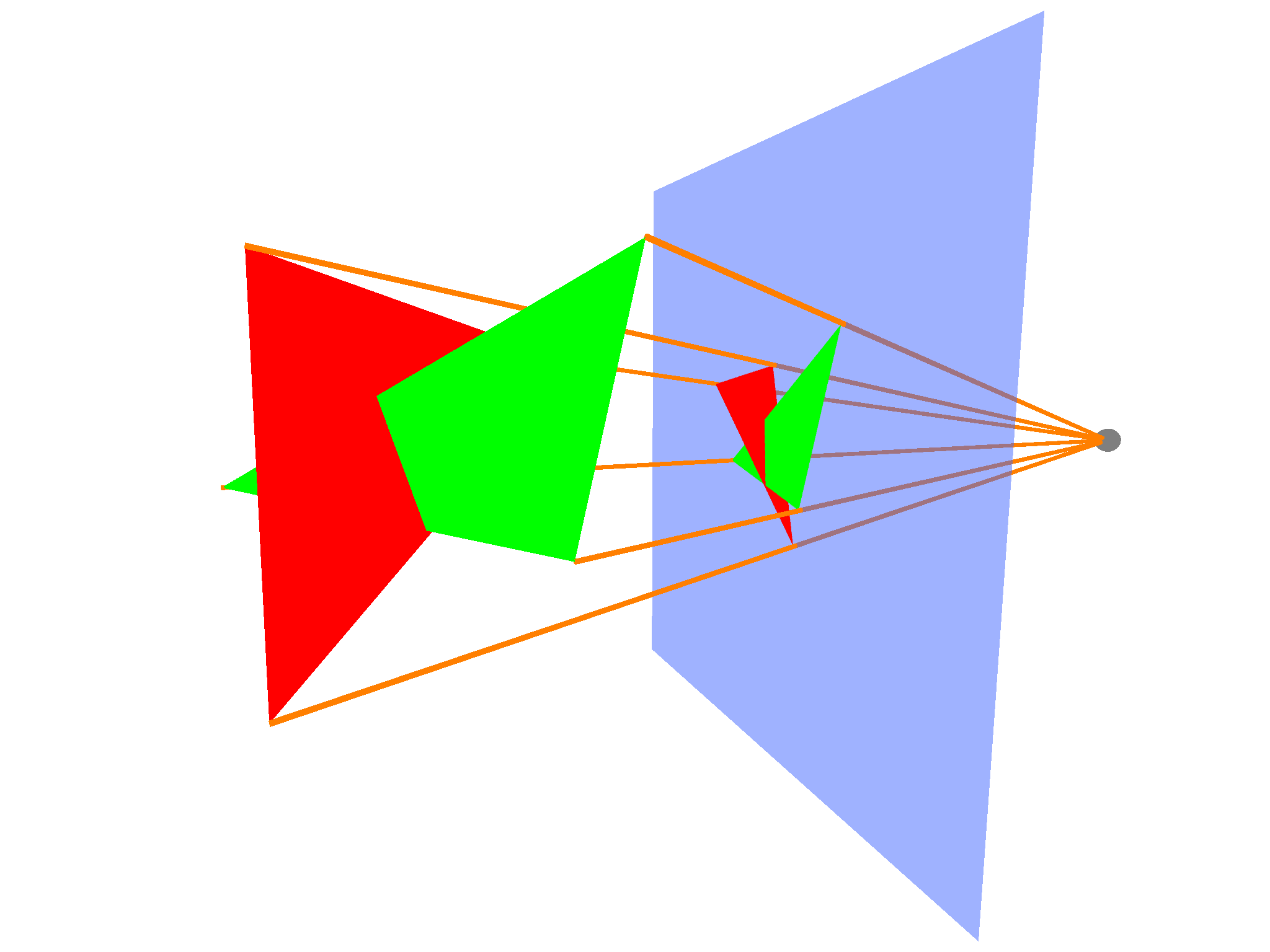
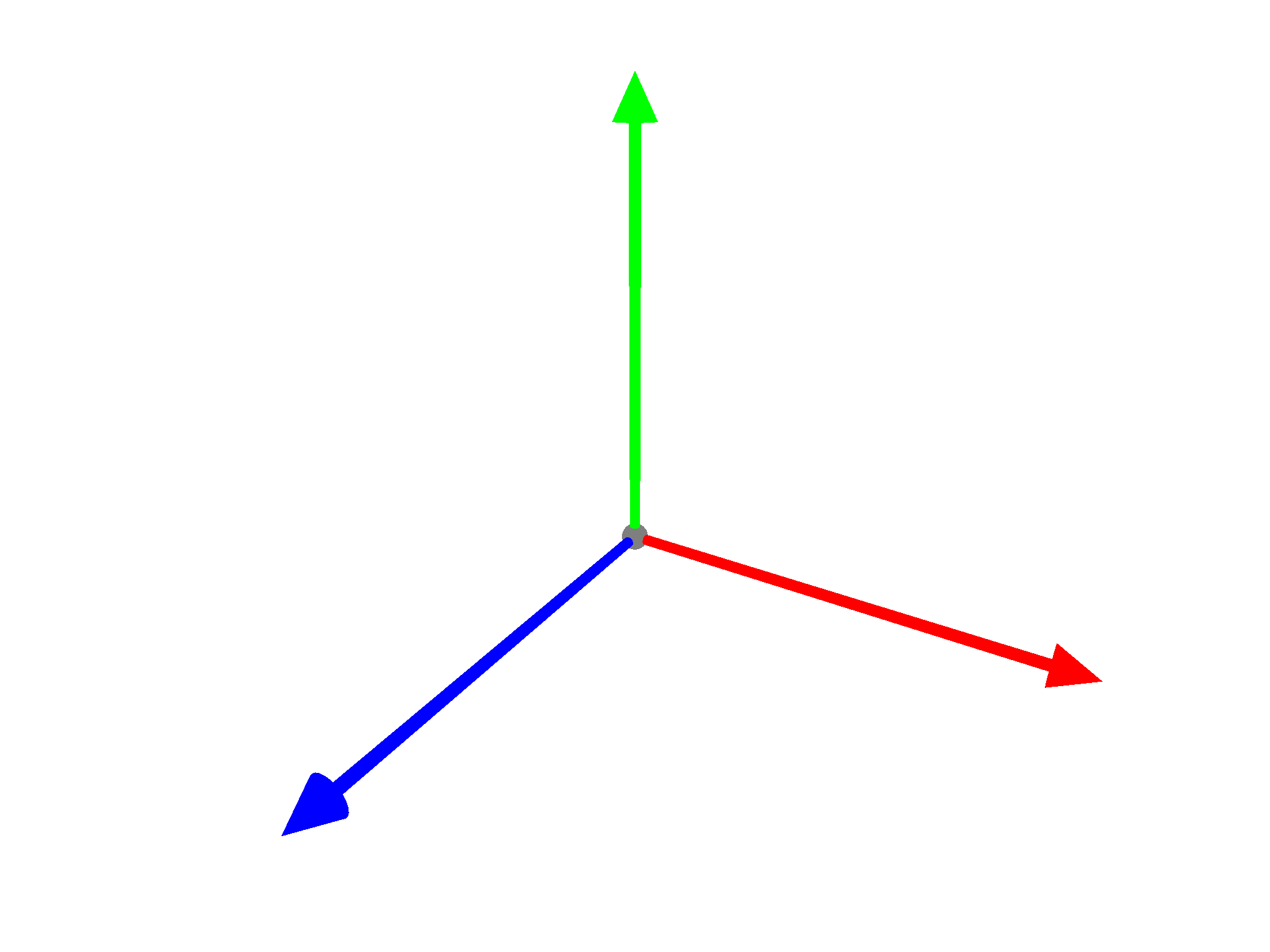
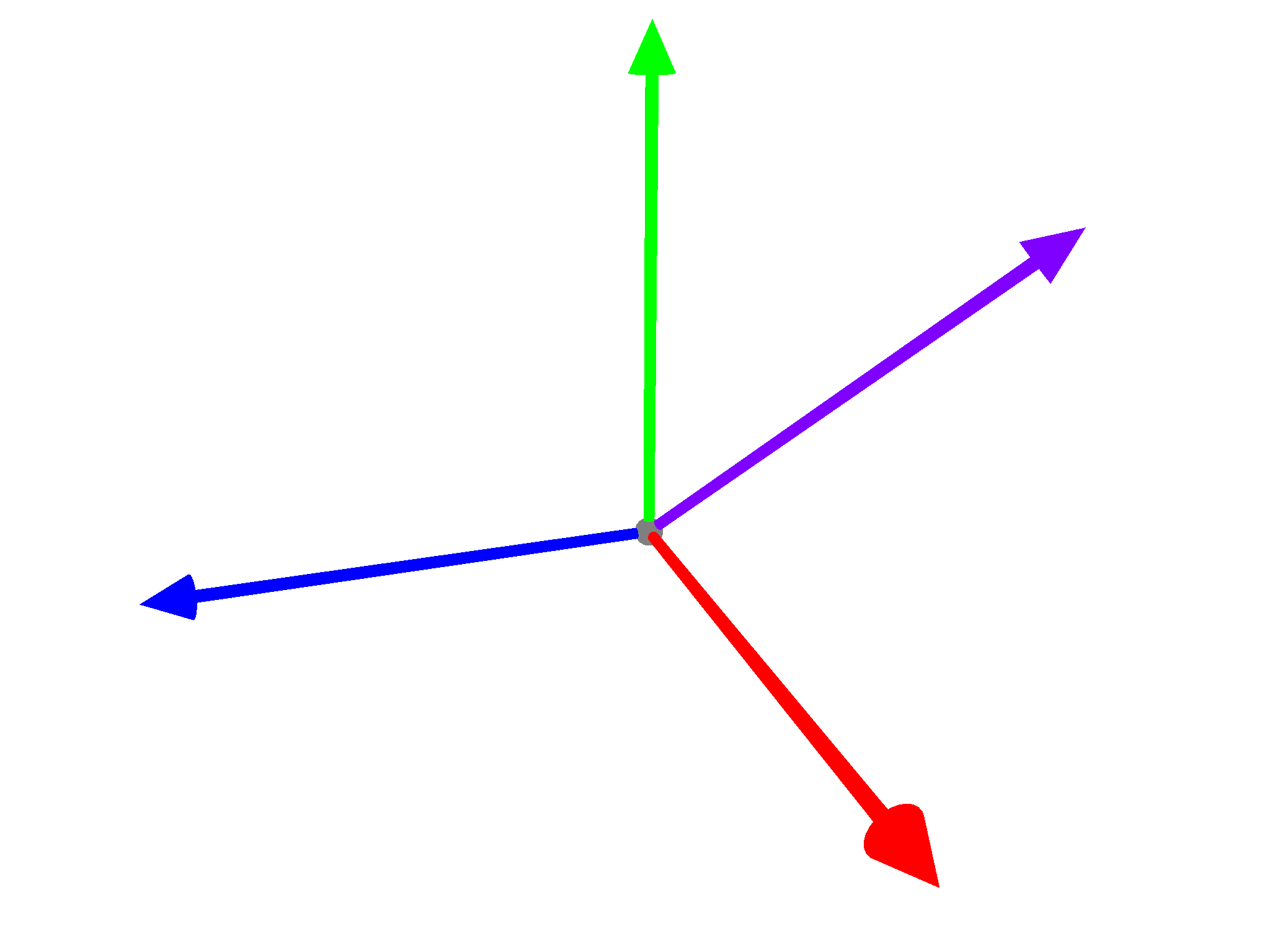
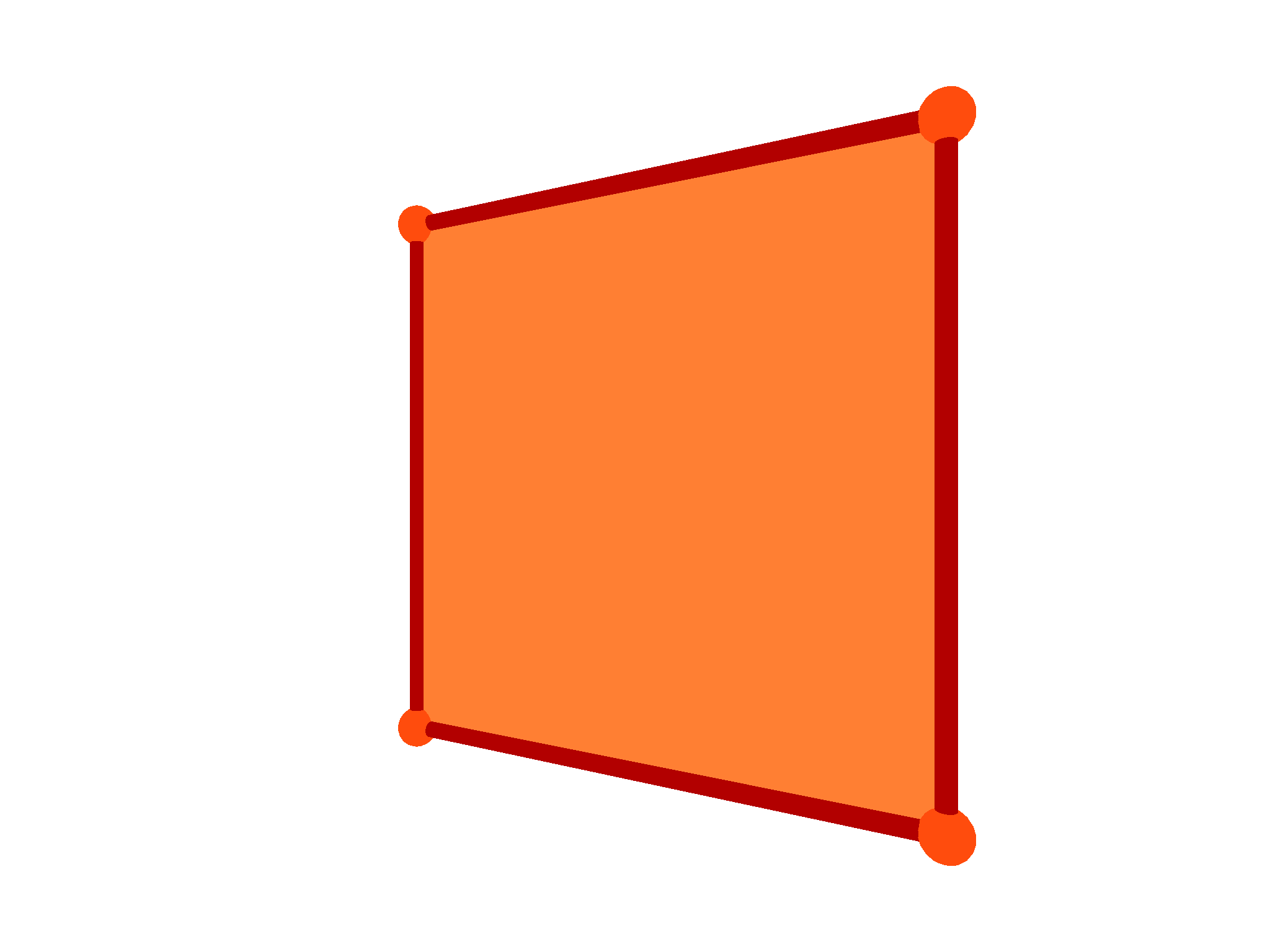
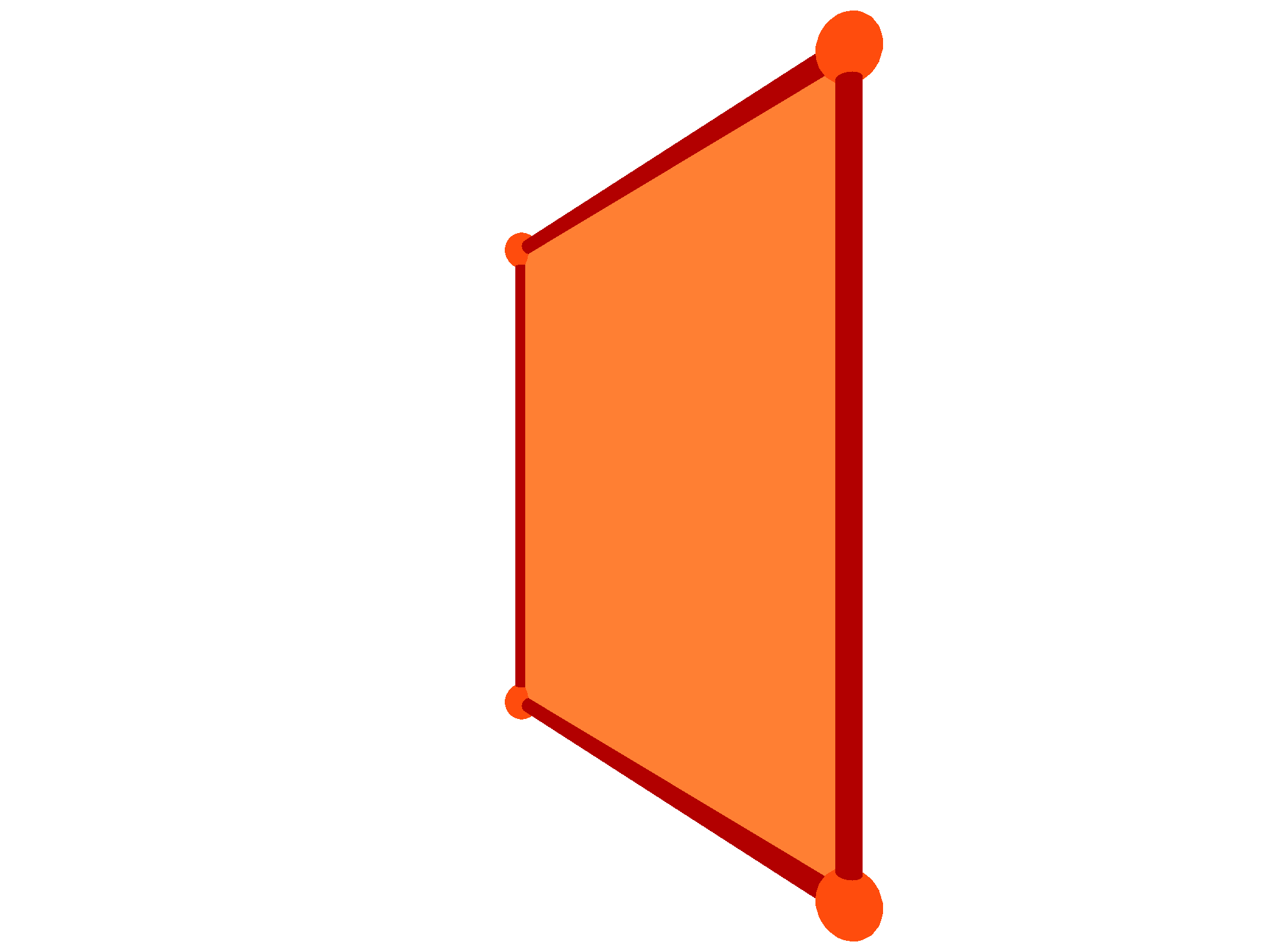
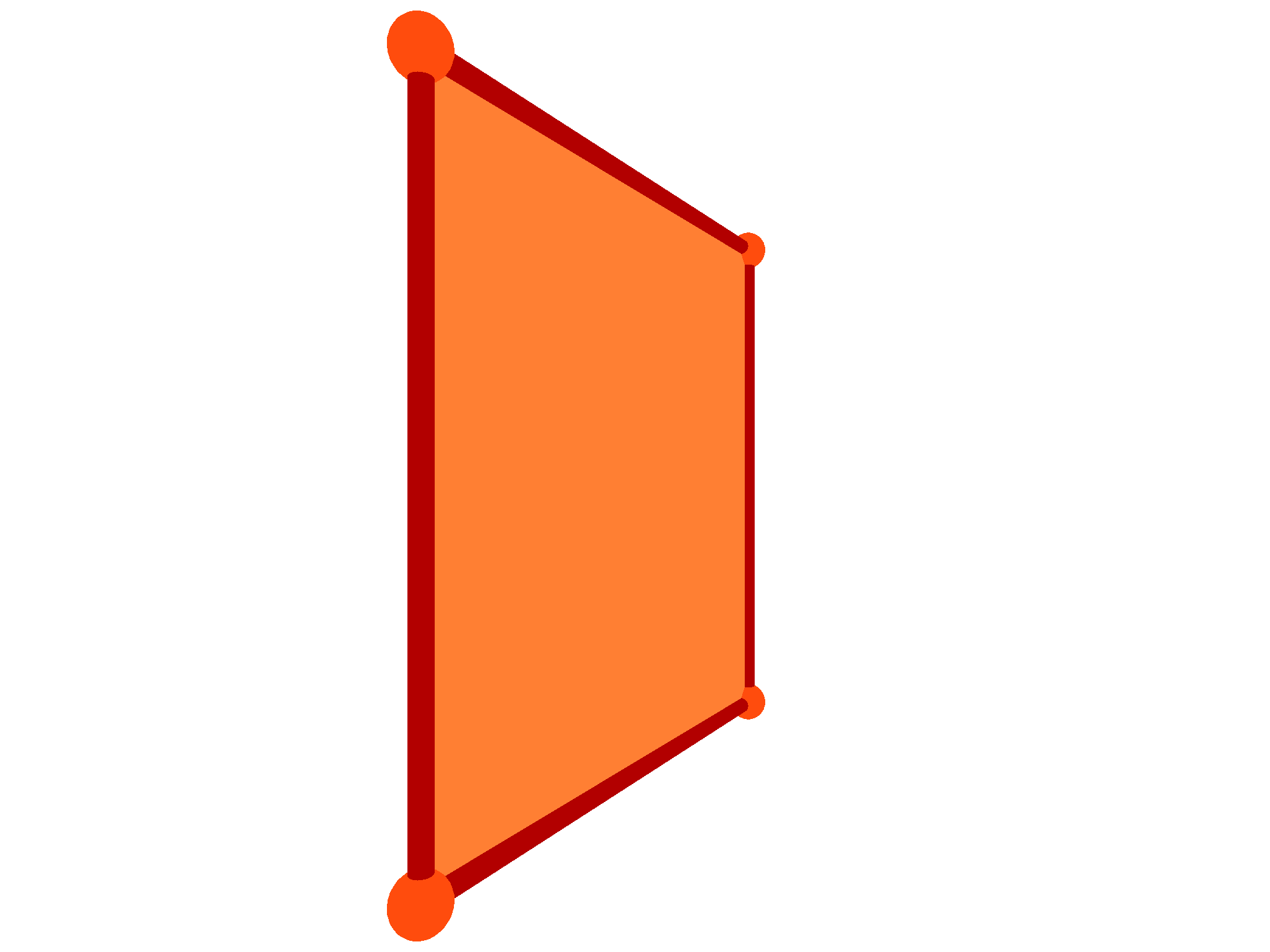
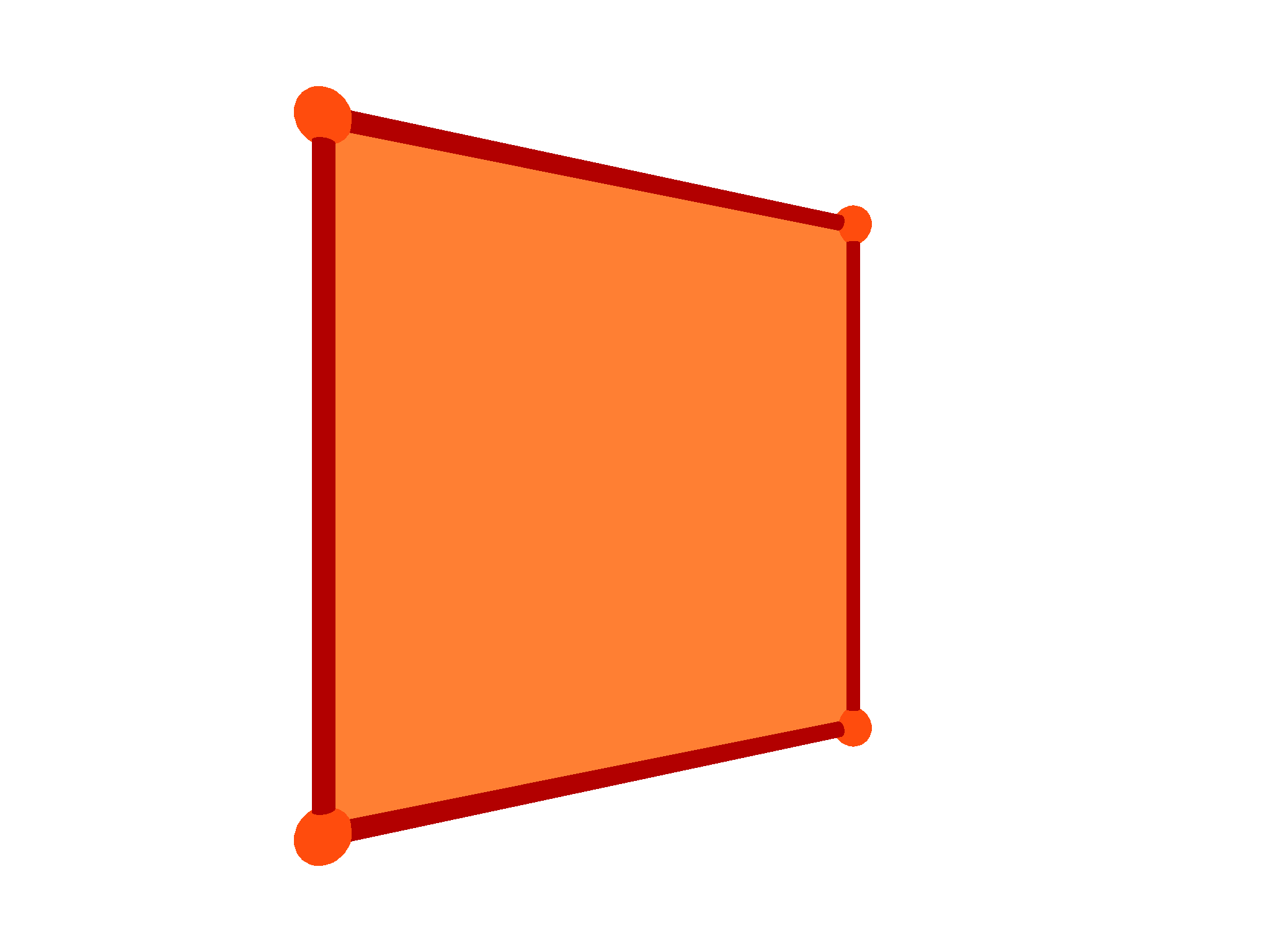
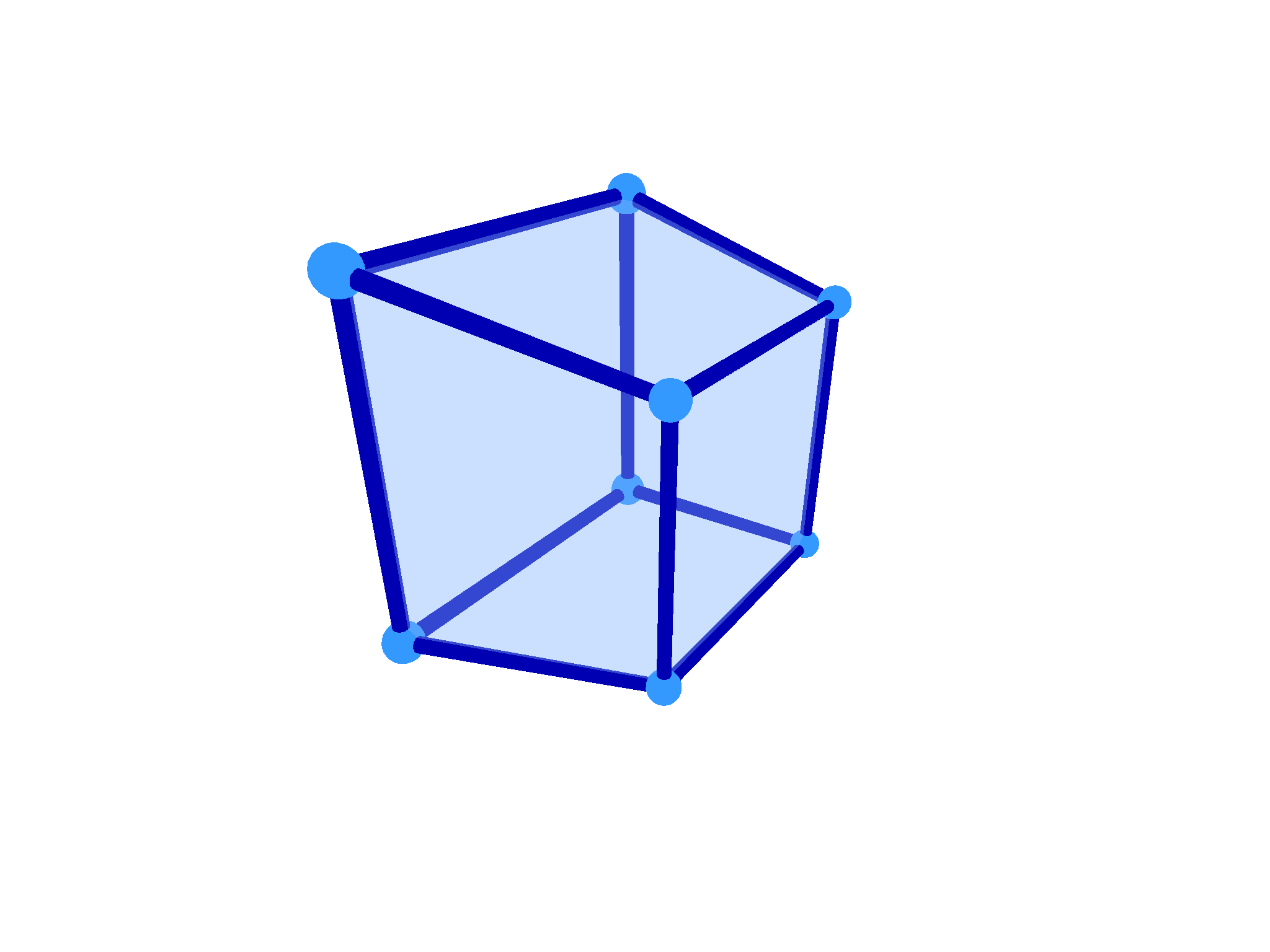
The right image above shows perspective projection, which is similar to our own perception with our eyes, since further objects appear smaller. The left image on the other hand shows an orthographic projection, in which further objects are of exactly the same size in the resulting image.
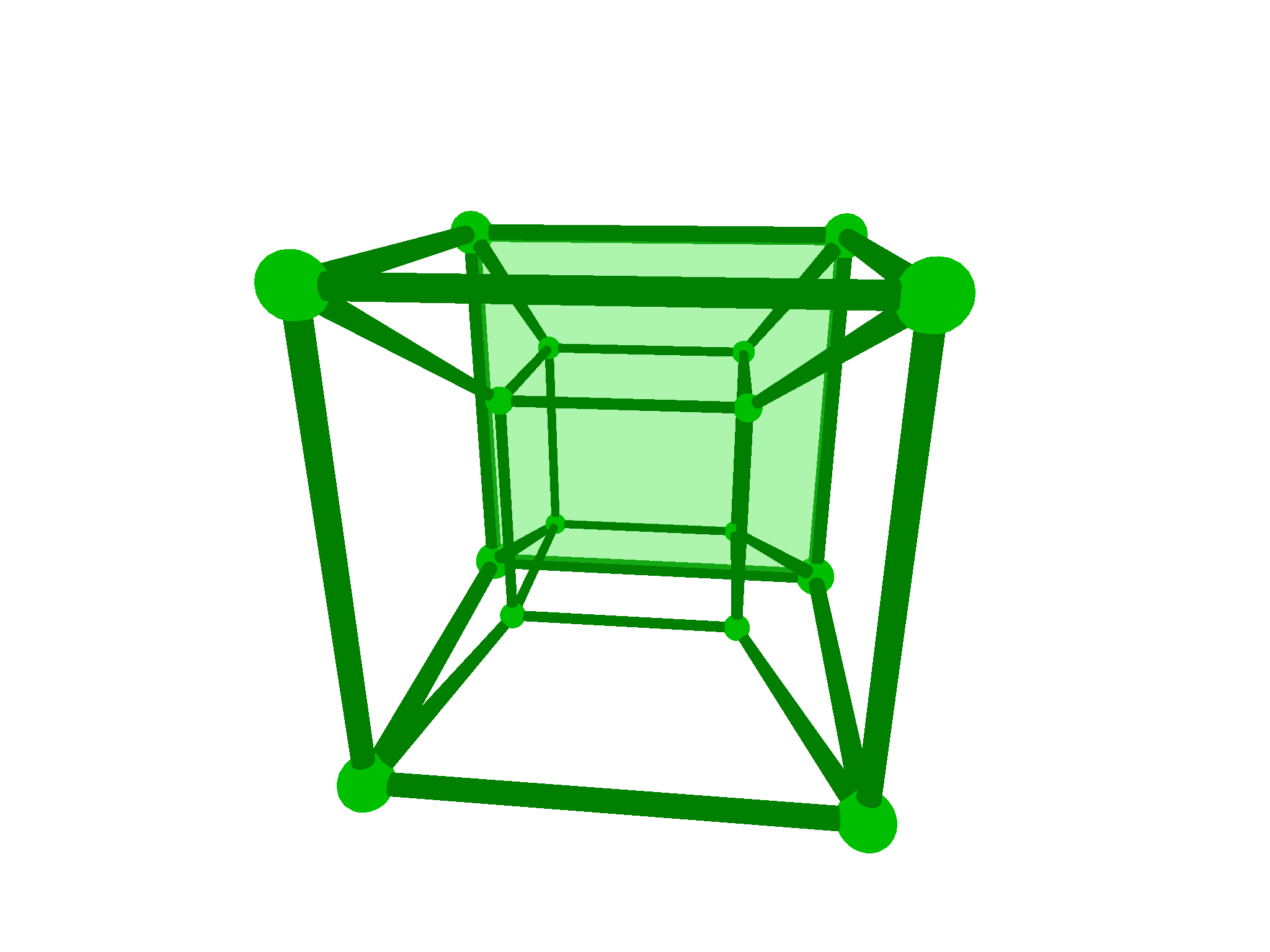
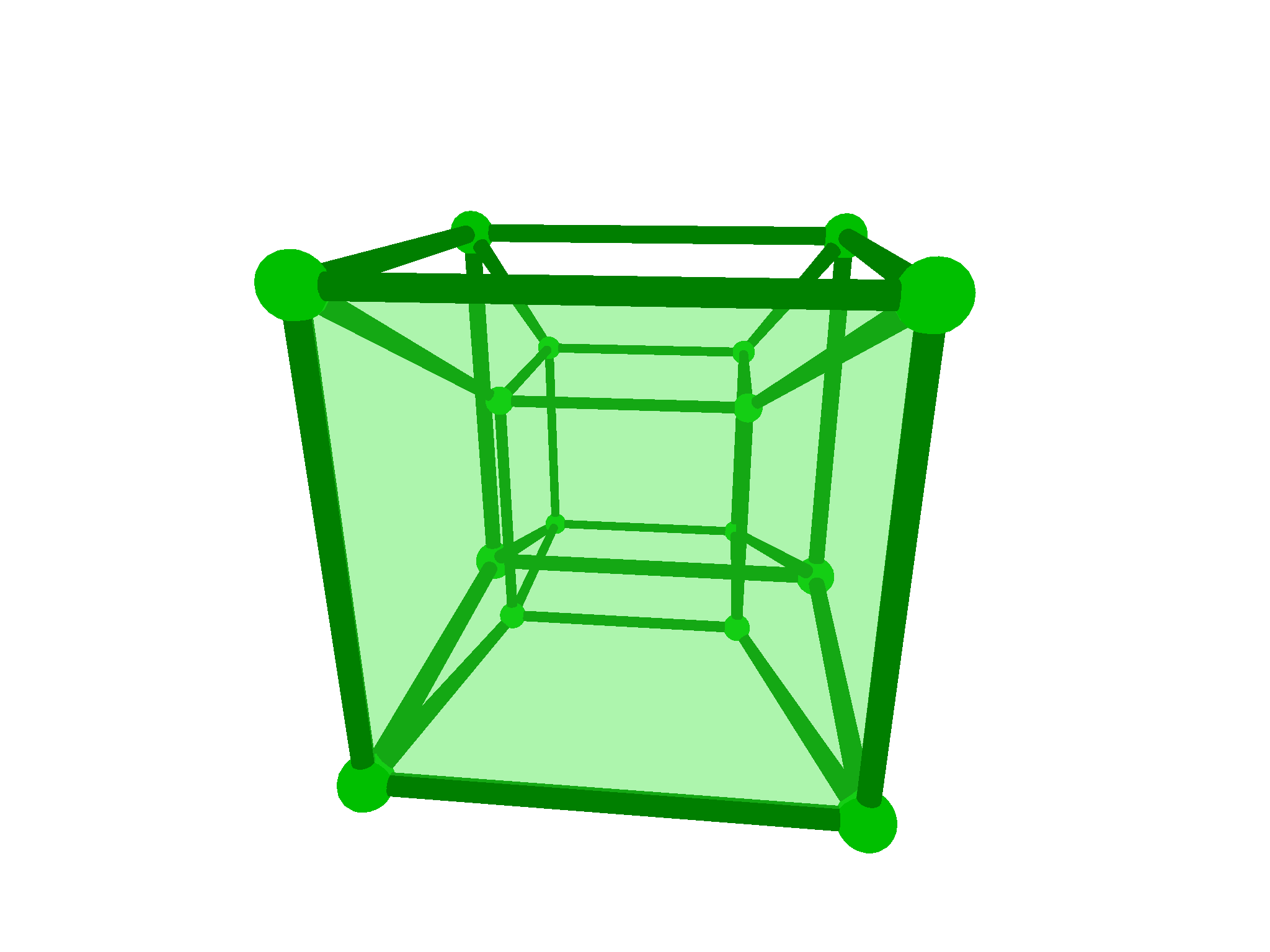
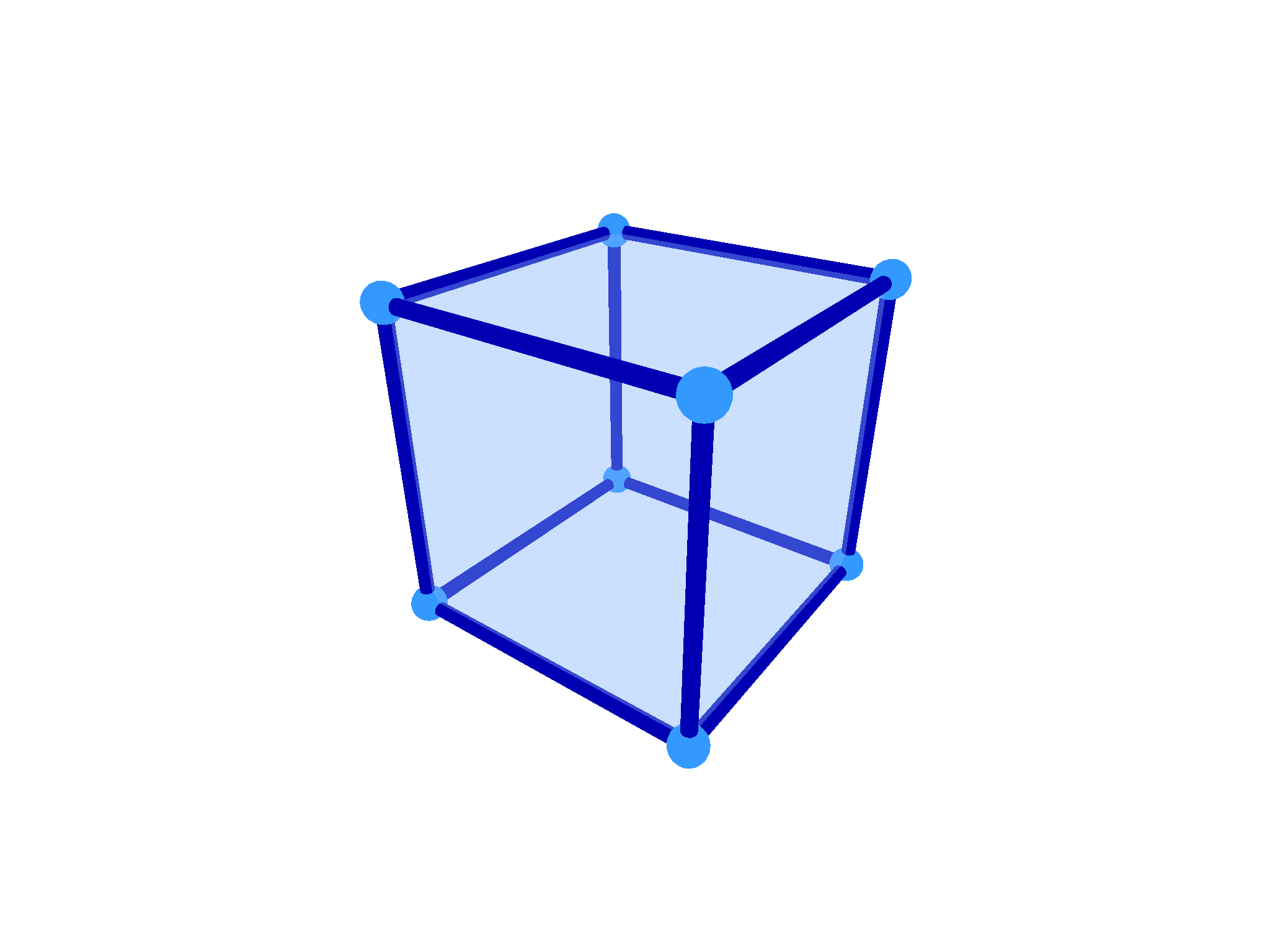
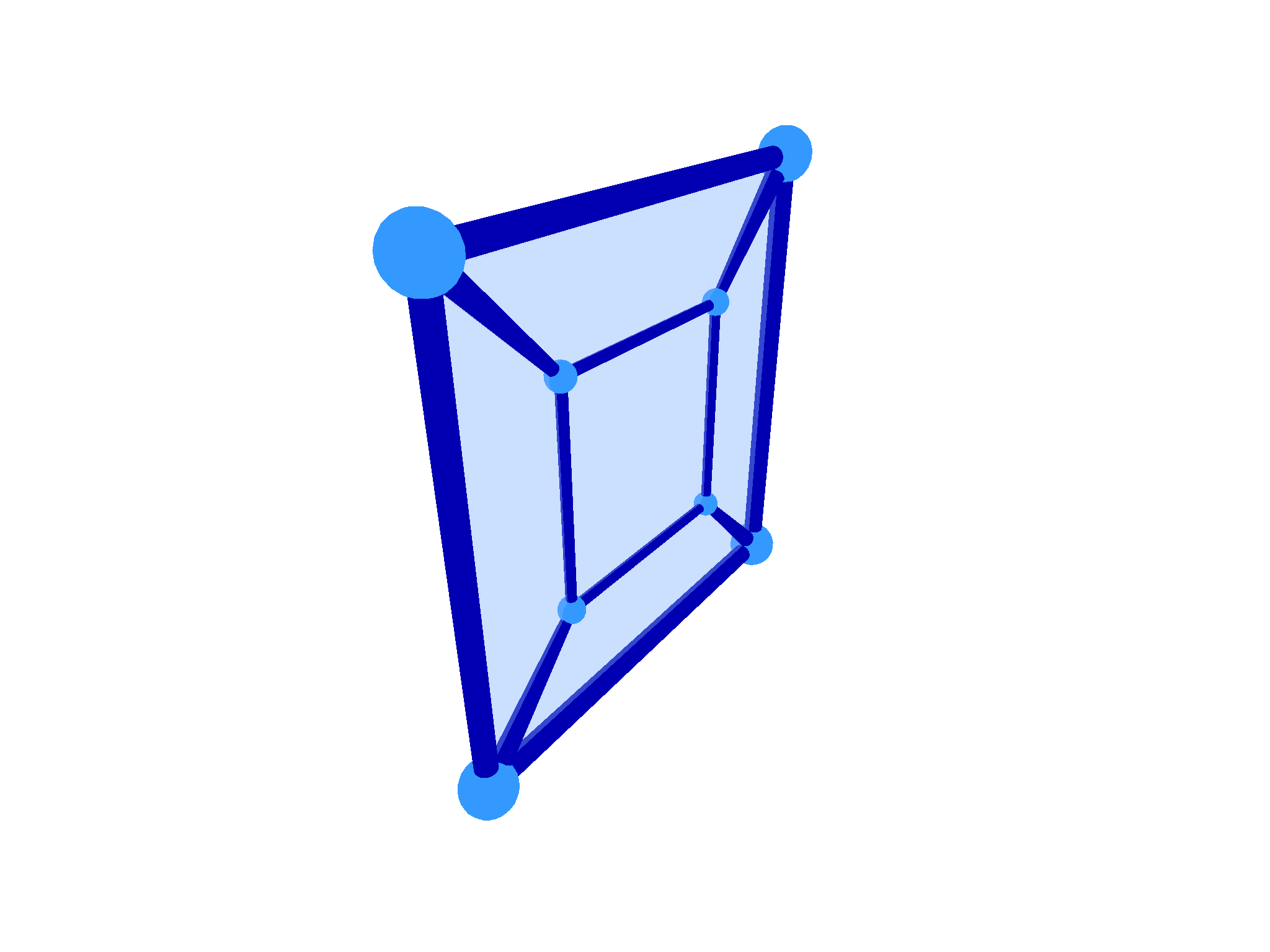
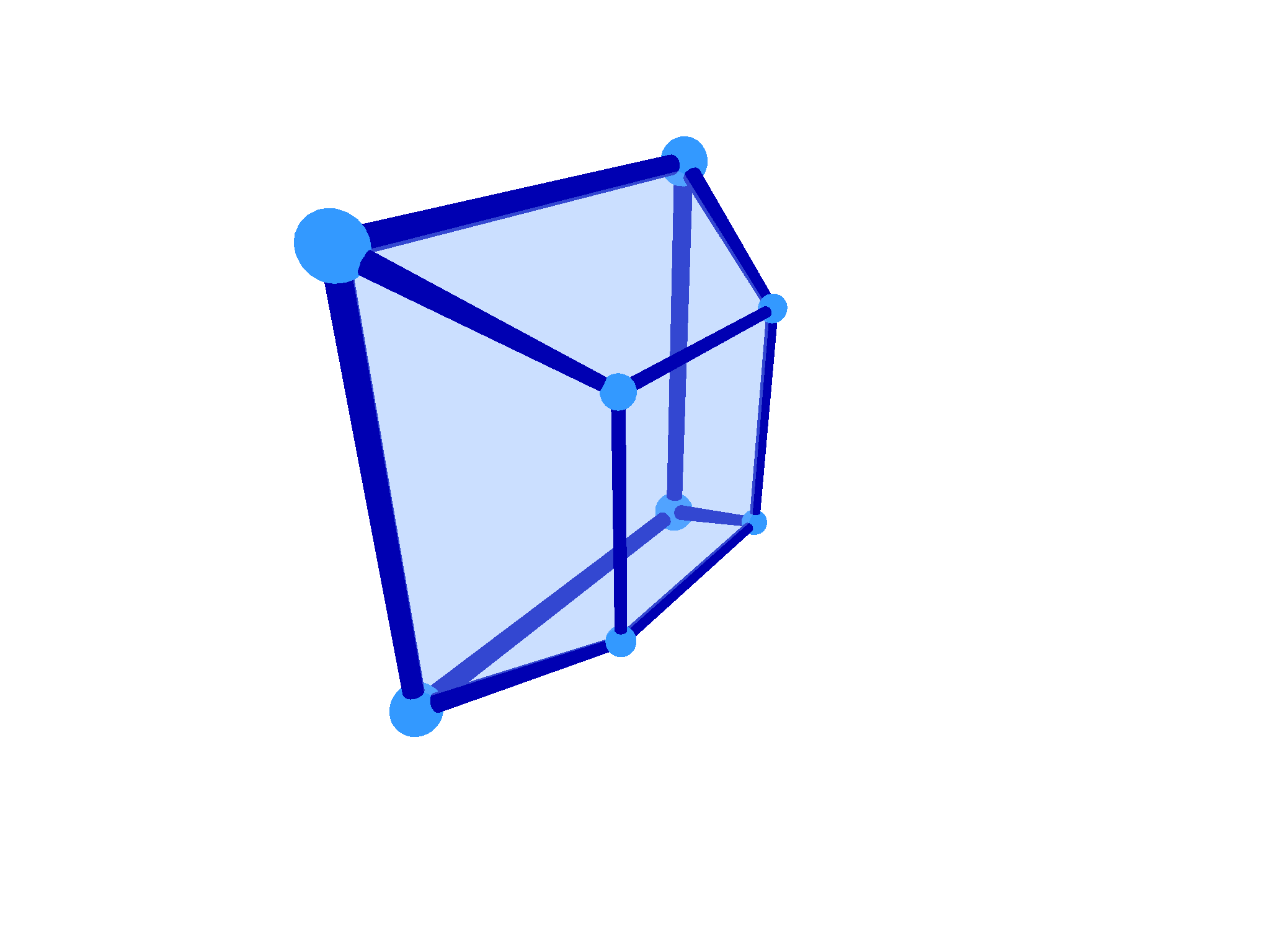
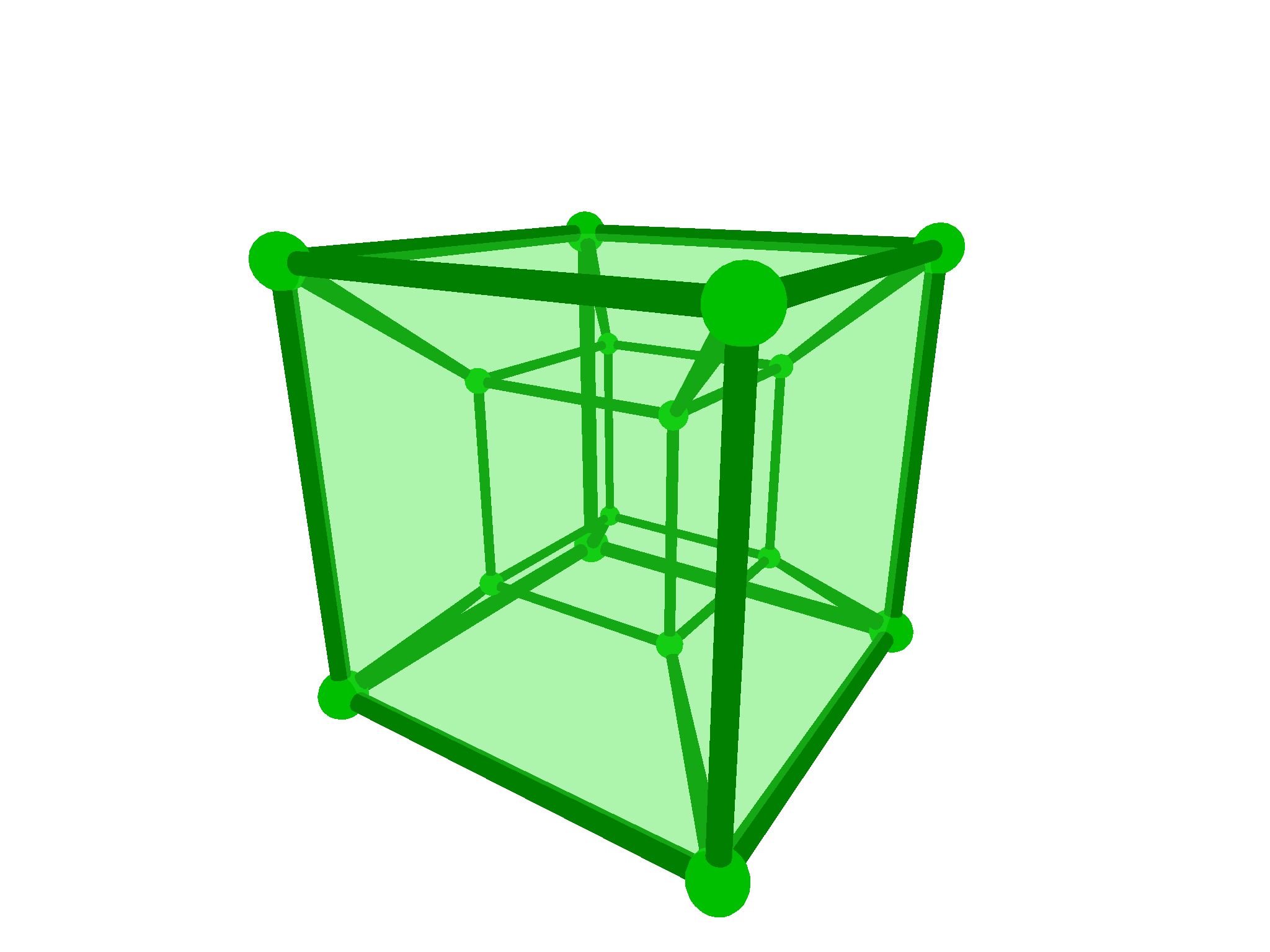
Here is an example of a transparent cube and its 4d equivalent, the tesseract, projected using a perspective projection.
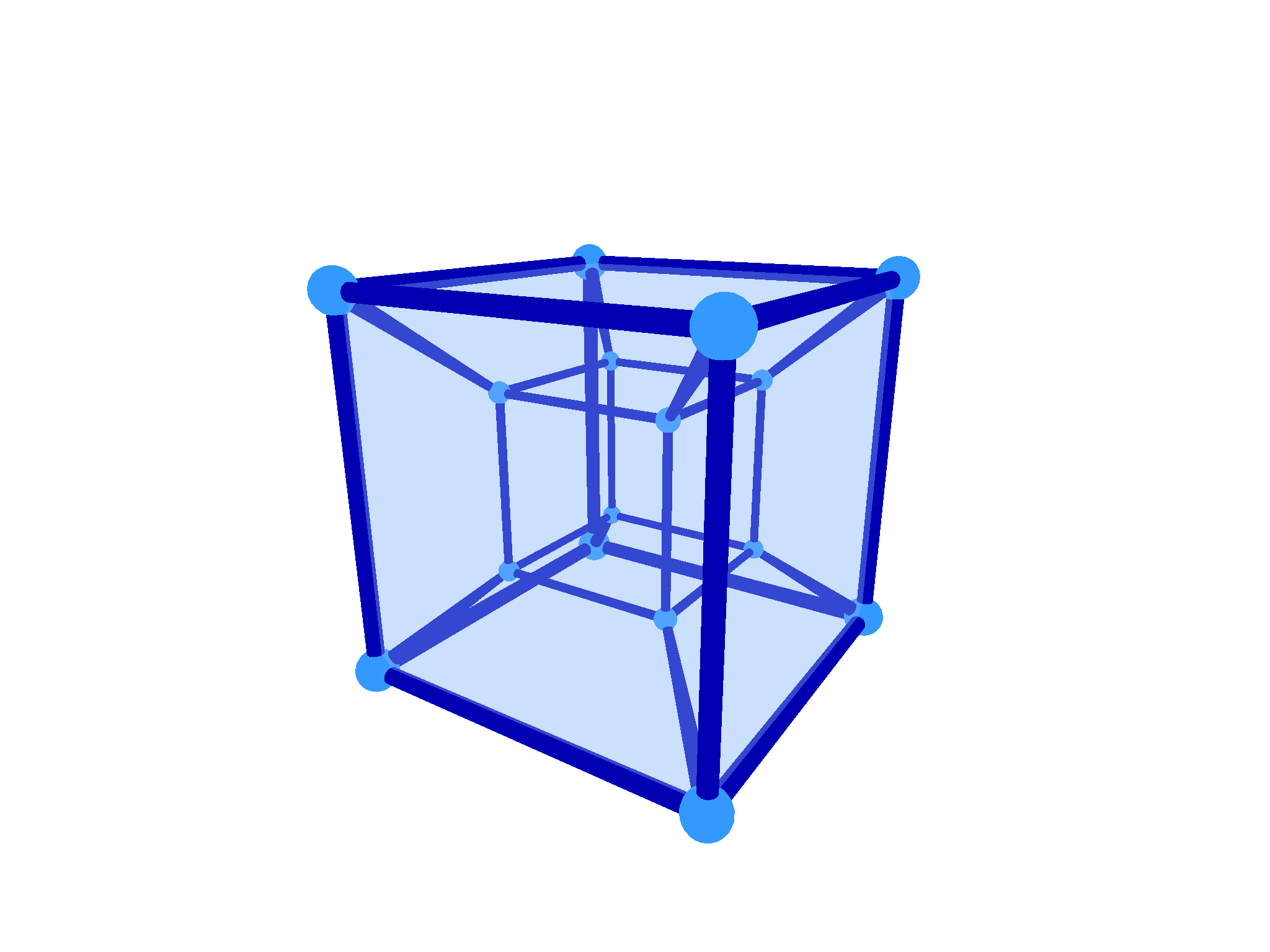
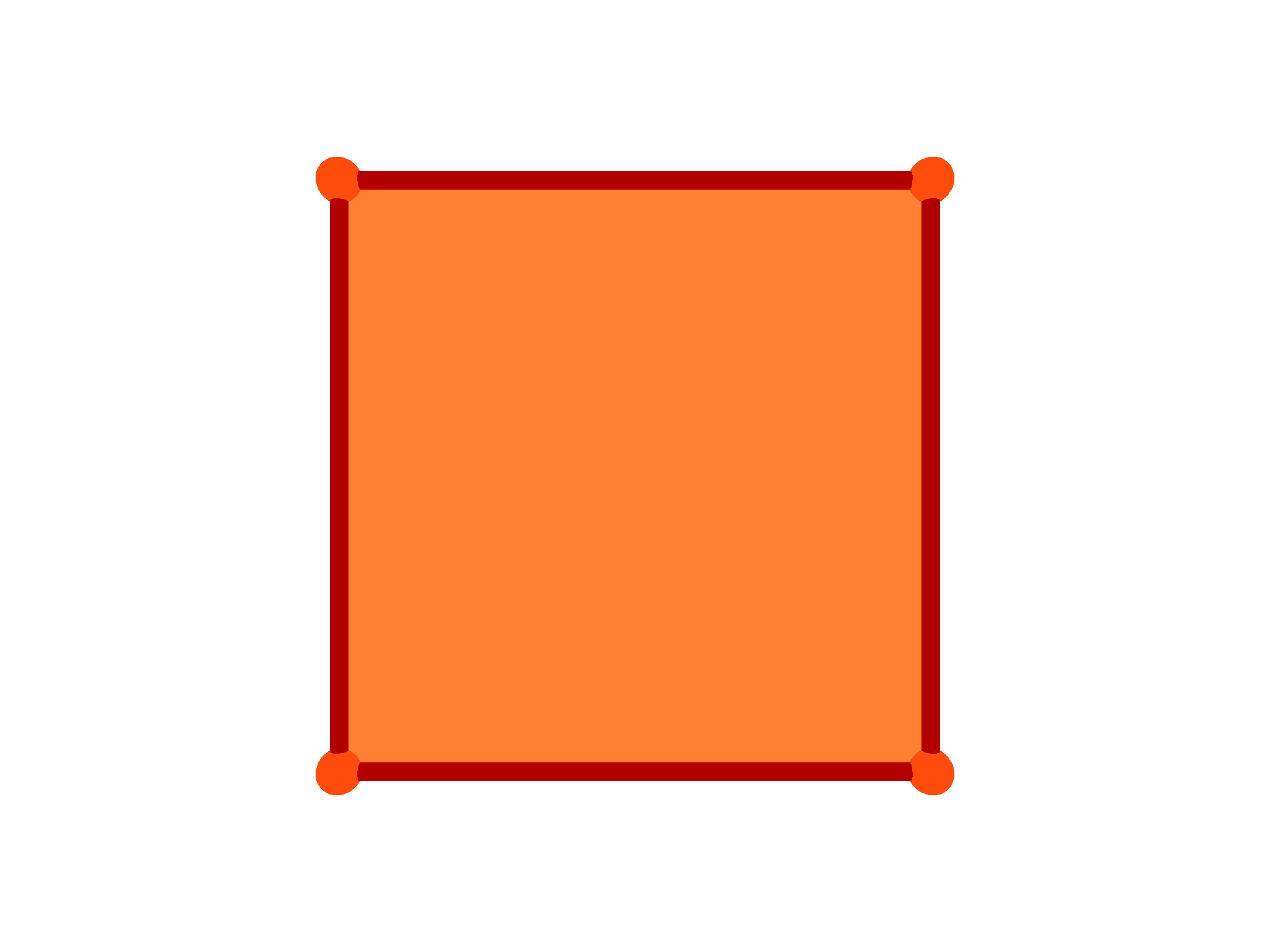
Just as the smaller square on the left isn't actually smaller, the smaller cube on the right isn't smaller either nor does it sit inside the bigger cube. Also, four faces of the cube on the left have a trapezoid shape in the projected image, but in reality these are perfect squares. Similarly, the six squished cubes around the smaller cube on the right represent perfect cubes in the actual 4d space. These distortions of the object happen due to projection.
Consider a point. It has no width, no height, no depth and is infinitely small. A point is therefore a 0-dimensional shape. We can create a line segment by extruding the point into another point. The line segment is a 1-dimensional shape as it only has a length. It has two 0d end points, its front and back "side". Extruding this line perpendicular to itself, we can create a square, a 2-dimensional shape. The square has four 1d line segments as its sides.
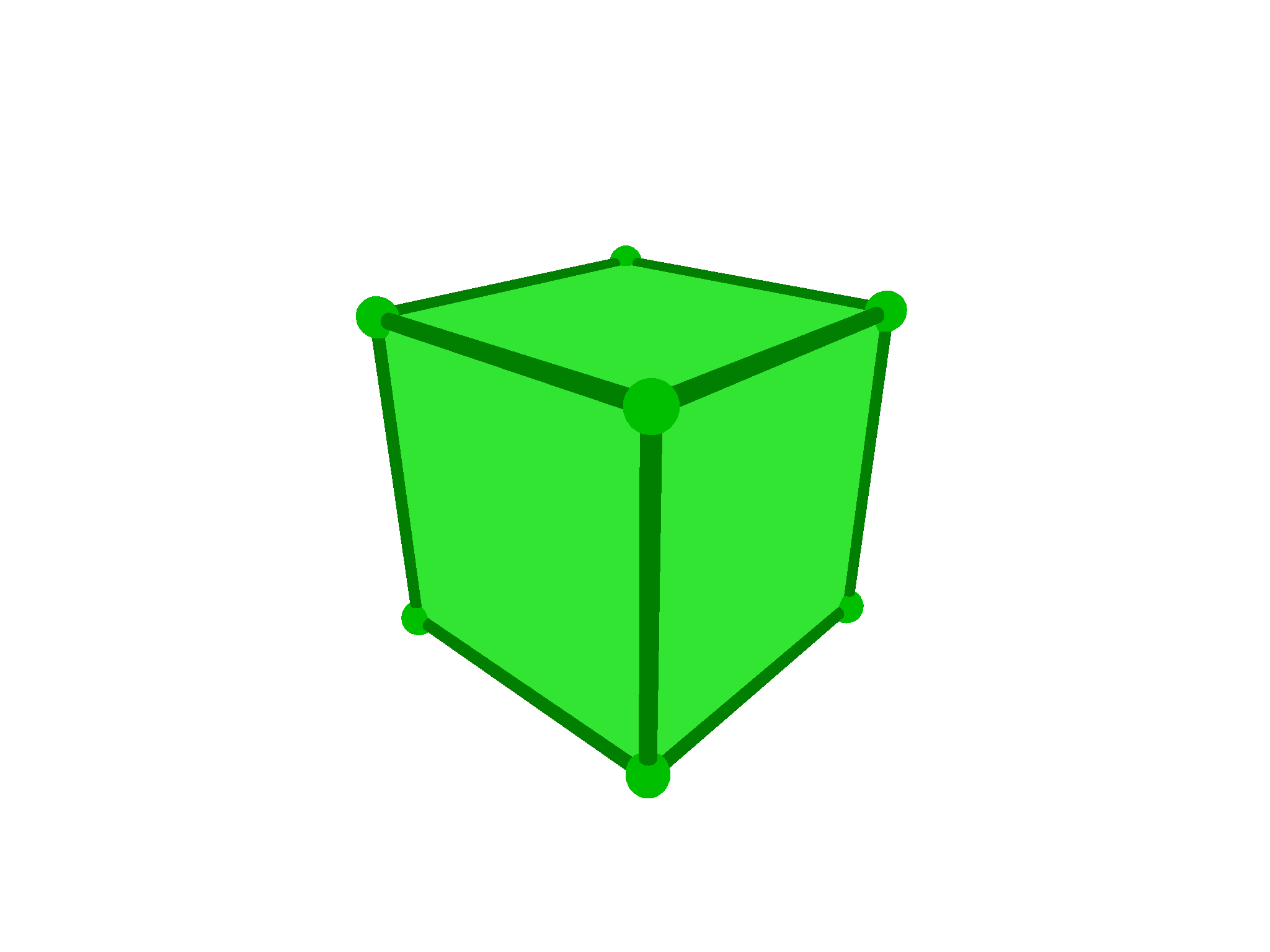
When we extrude for a third time, we get a cube, a 3-dimensional shape. It has six 2d squares as its sides.
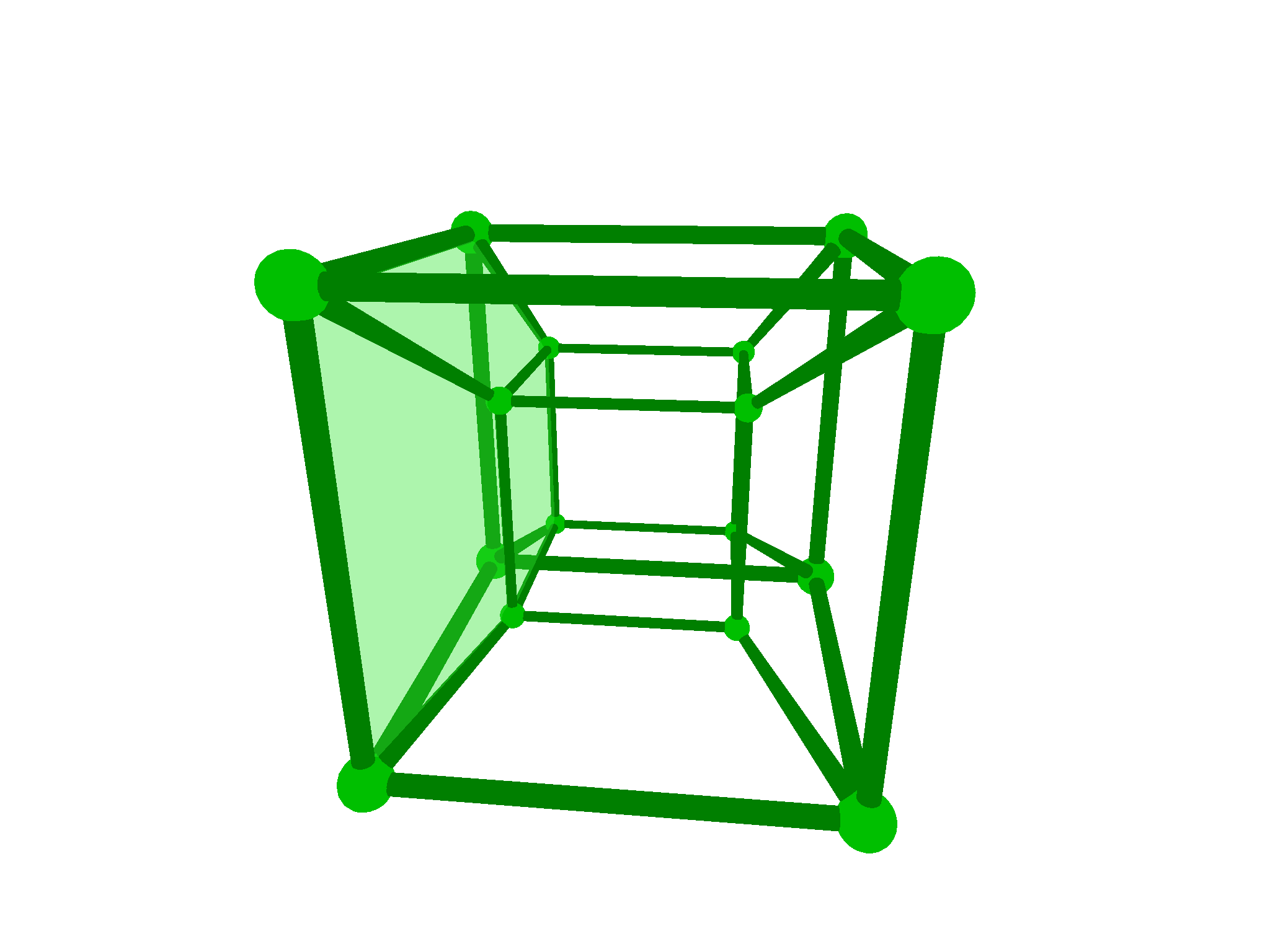
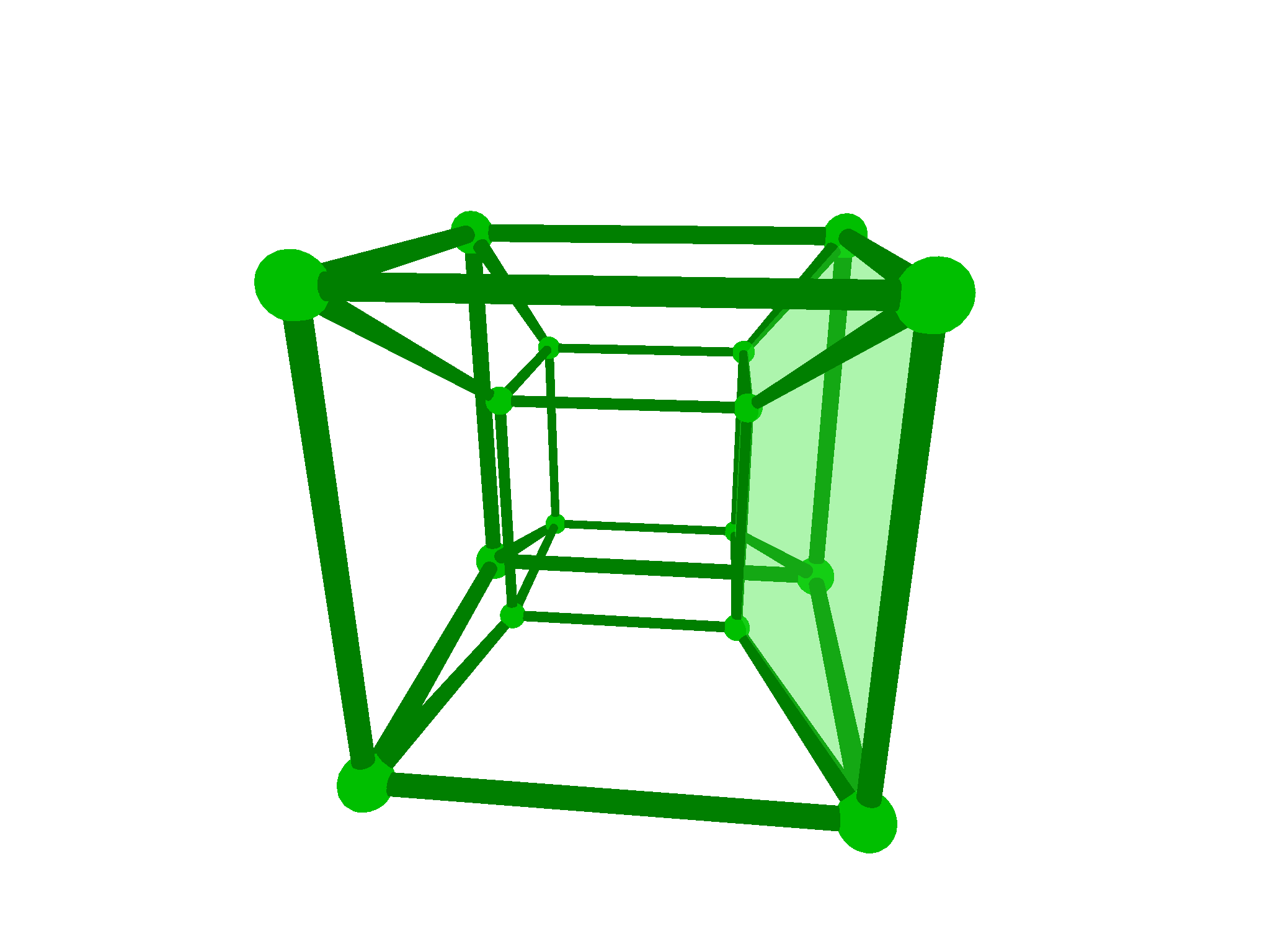
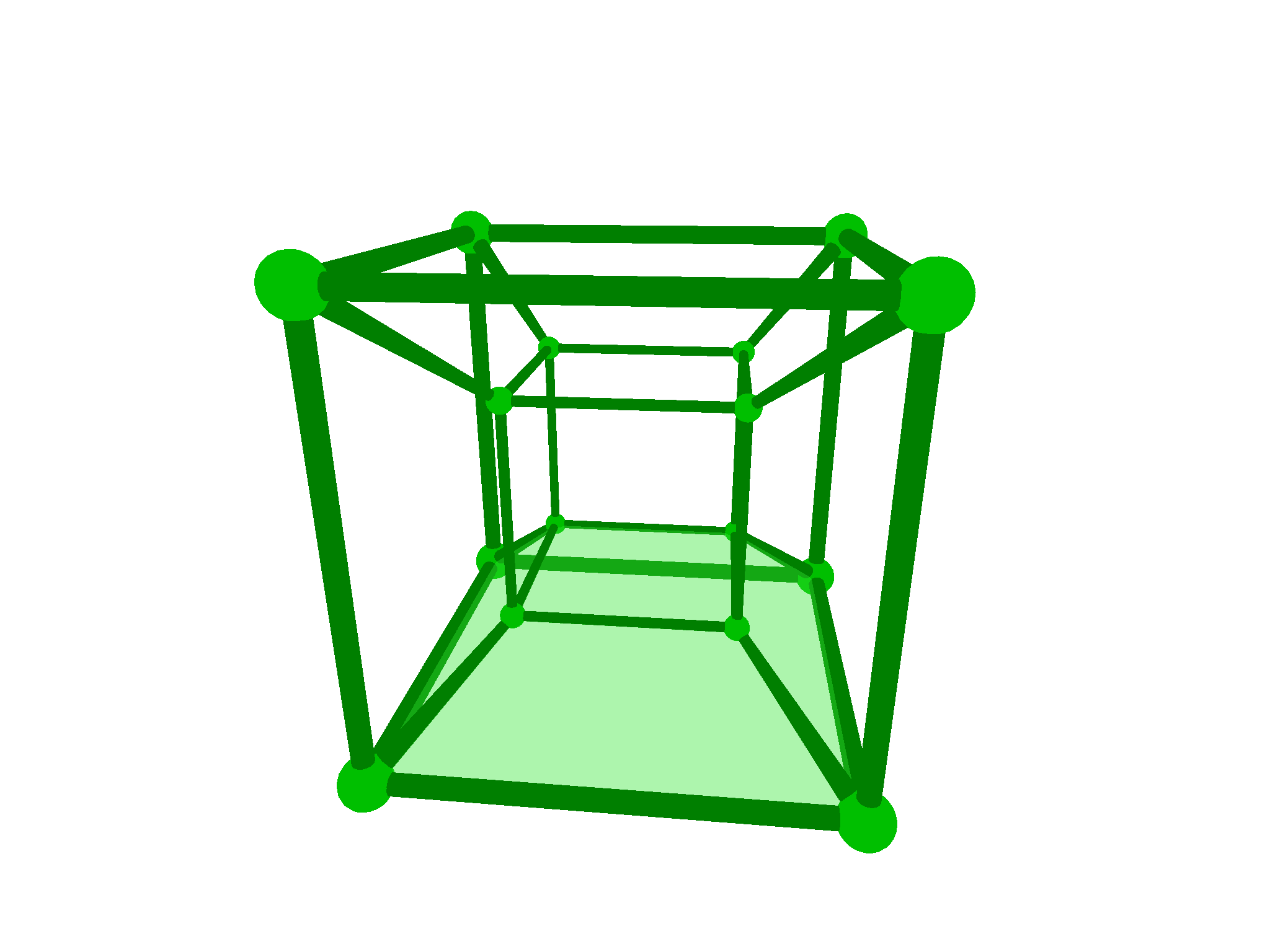
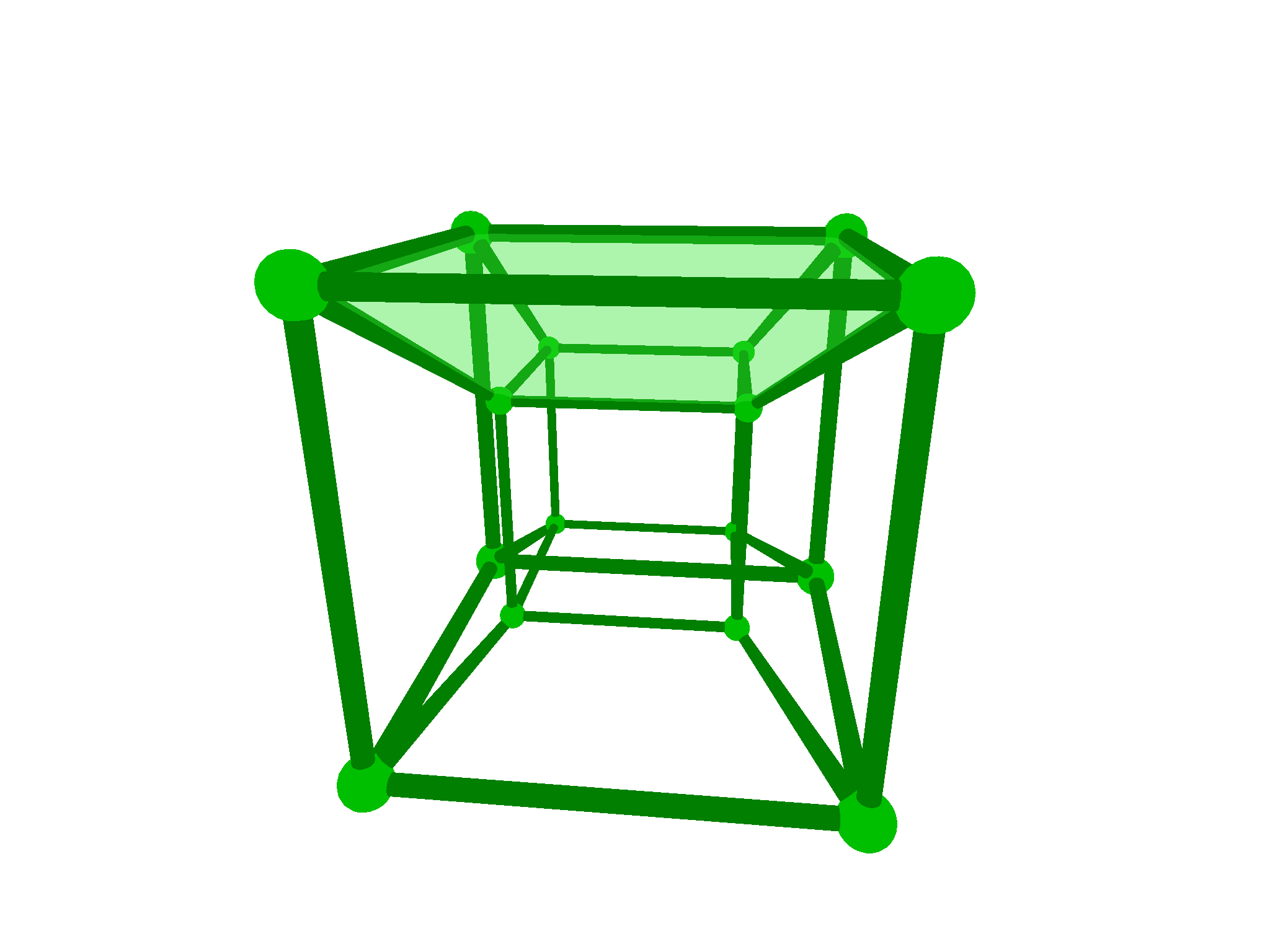
So, by analogy, the tesseract can be constructed by extruding a cube perpendicular to itself and has eight 3d cubes as its sides. Using our perspective projection, we indeed see eight cubes:
Rotation is normally thought of as happening around an axis, but this only makes sense in three dimensions. In two dimensions, rotations don't happen around the x or y axes, but around a single point. Because of the extra dimension in 4d space, rotations actually happen around an entire plane. Therefore, it is simpler to say that rotations happen in a plane, since this is true for any number of dimensions. We can deconstruct any arbitrary orientation as a sequence of basic rotations in a similar way we can deconstruct any position in space into x, y and z coordinates. But instead of using the three right angled axes x, y and z, we use the three planes xy, xz and yz. Similarly, we only use the xy plane in two dimensional space and we use the six planes xy, xz, yz, xw, yw and zw in four dimensional space.
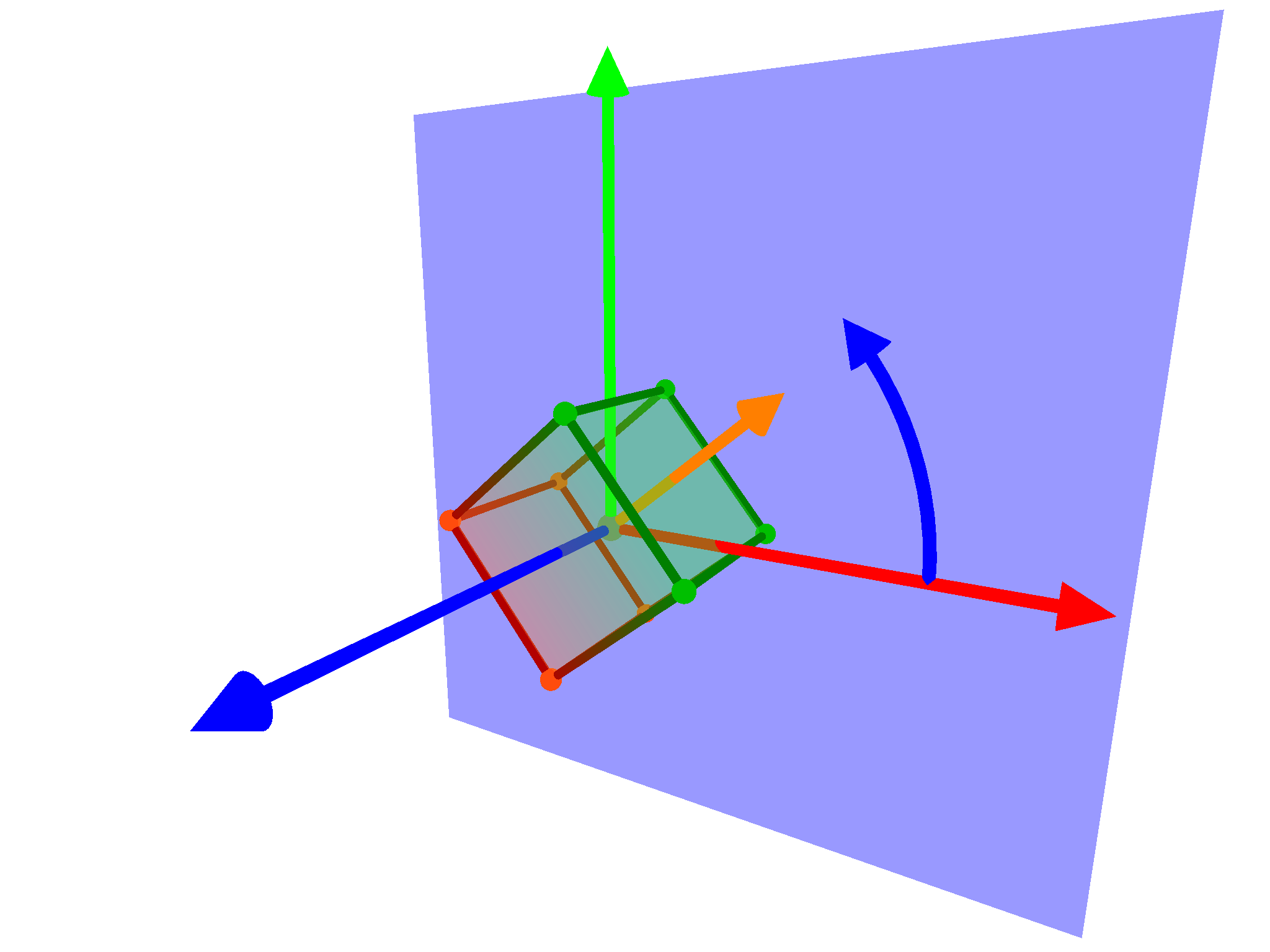
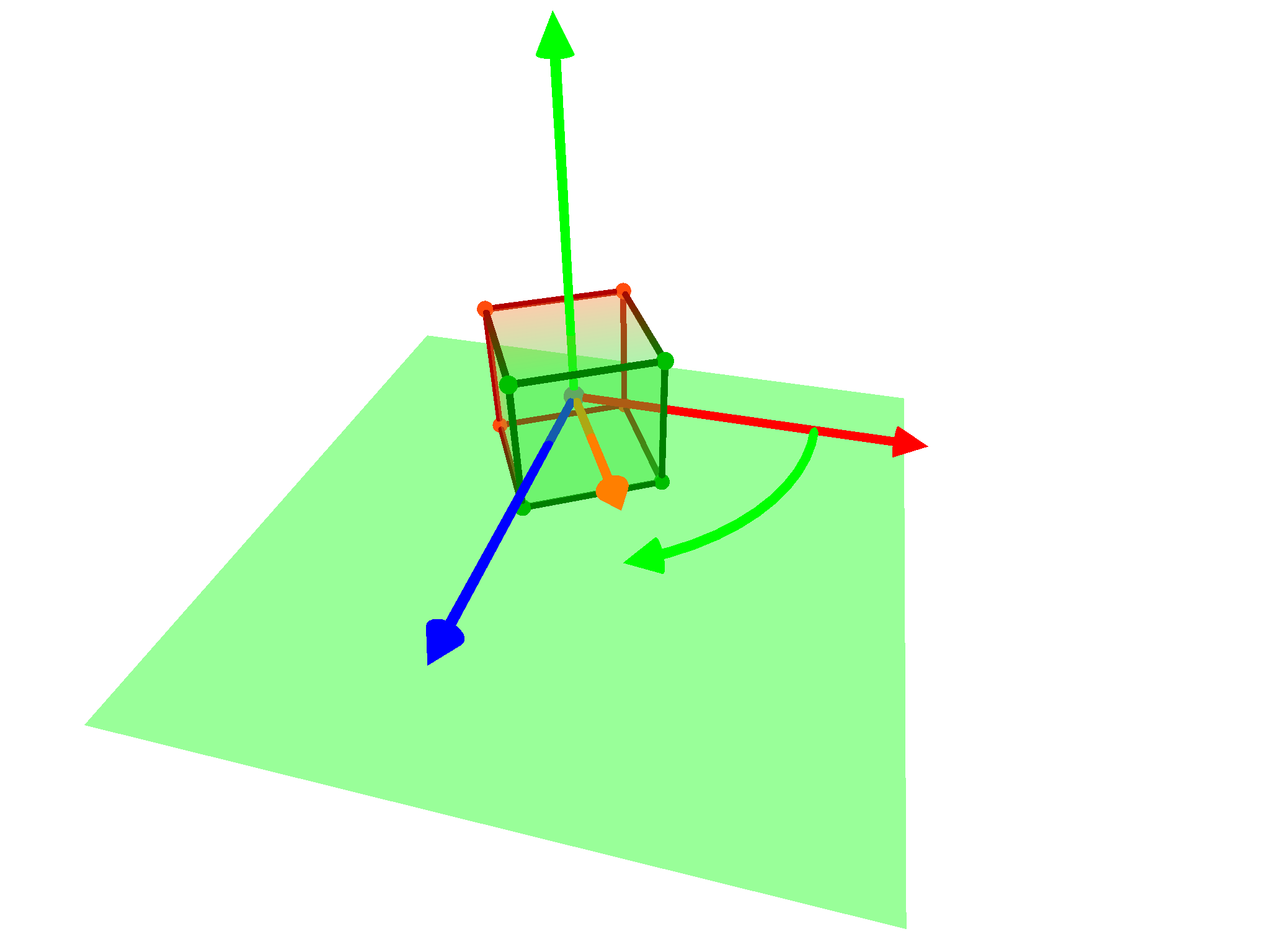
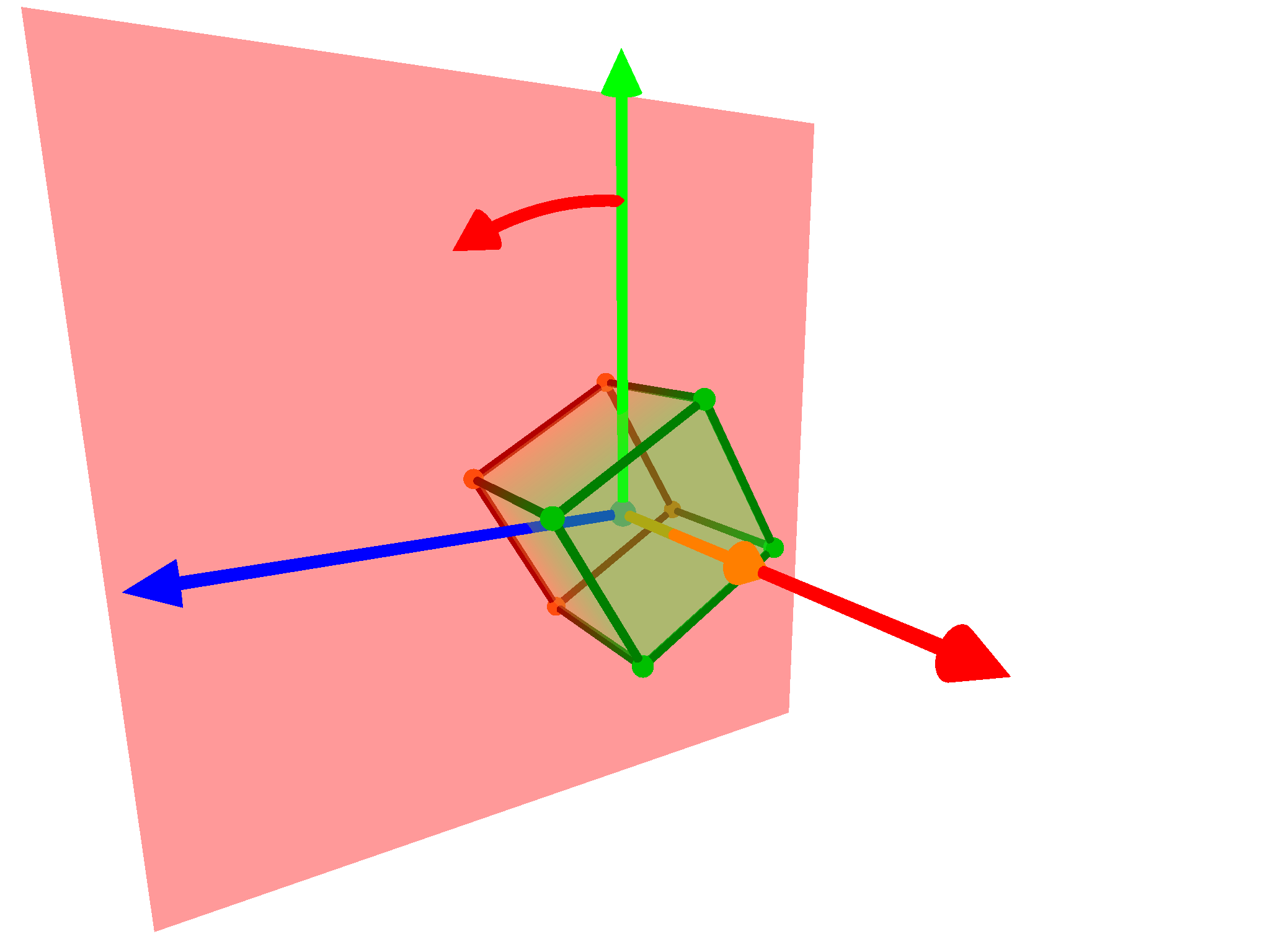
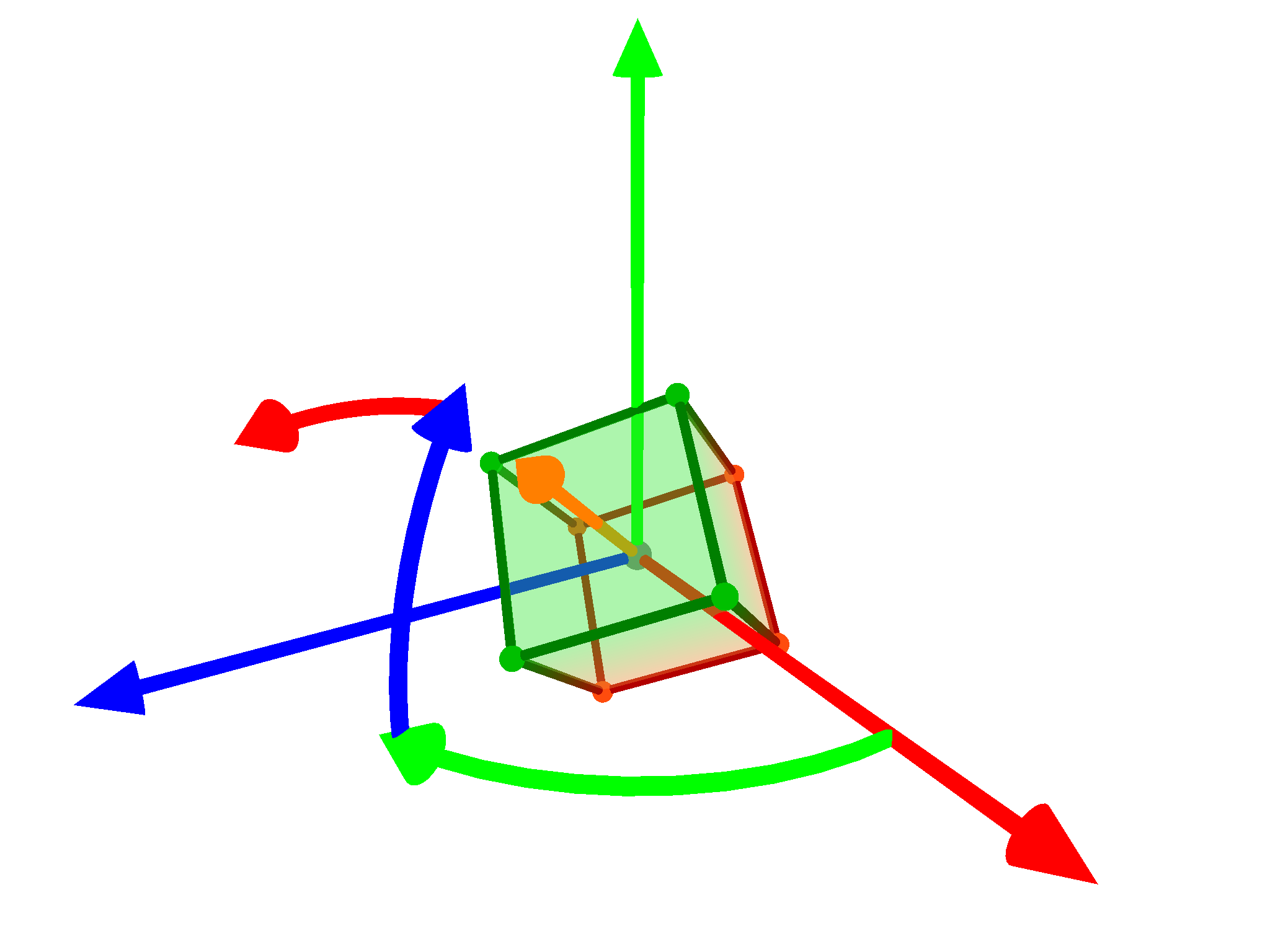
The xy, yz and xz rotations look very much the same as in 3d space, when using the projection of the tesseract from before, as the camera points in the direction of the w-axis. However, to understand the xw, yw and zw rotations, lets first consider the situation one dimension lower: a square rotating in 3d space, in the xz plane.

To a 2d creature, this would look rather strange, as the shape is constantly deforming, from a square to a trapezoid to a line and back. It looks like a square turning itself inside out. Similarly, a rotation in the yz plane would also look like a square turning itself inside out, but along the y-axis instead of the x-axis.
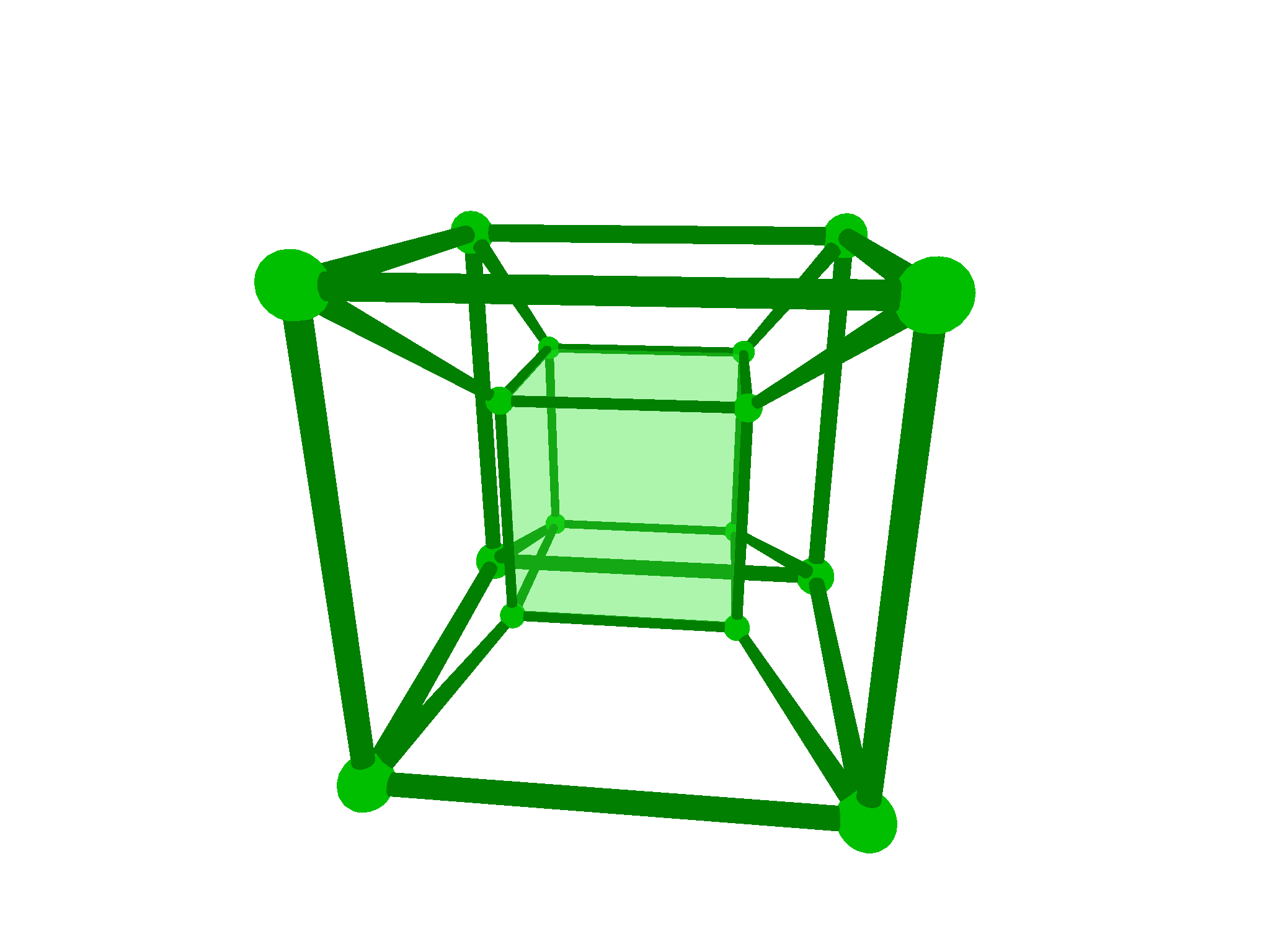
So, the same inside-out thing happens when we rotate a cube in the xw plane:
And as you can imagine, the two other rotations yw and zw correspond to inside-out action along the y and z axes respectively.
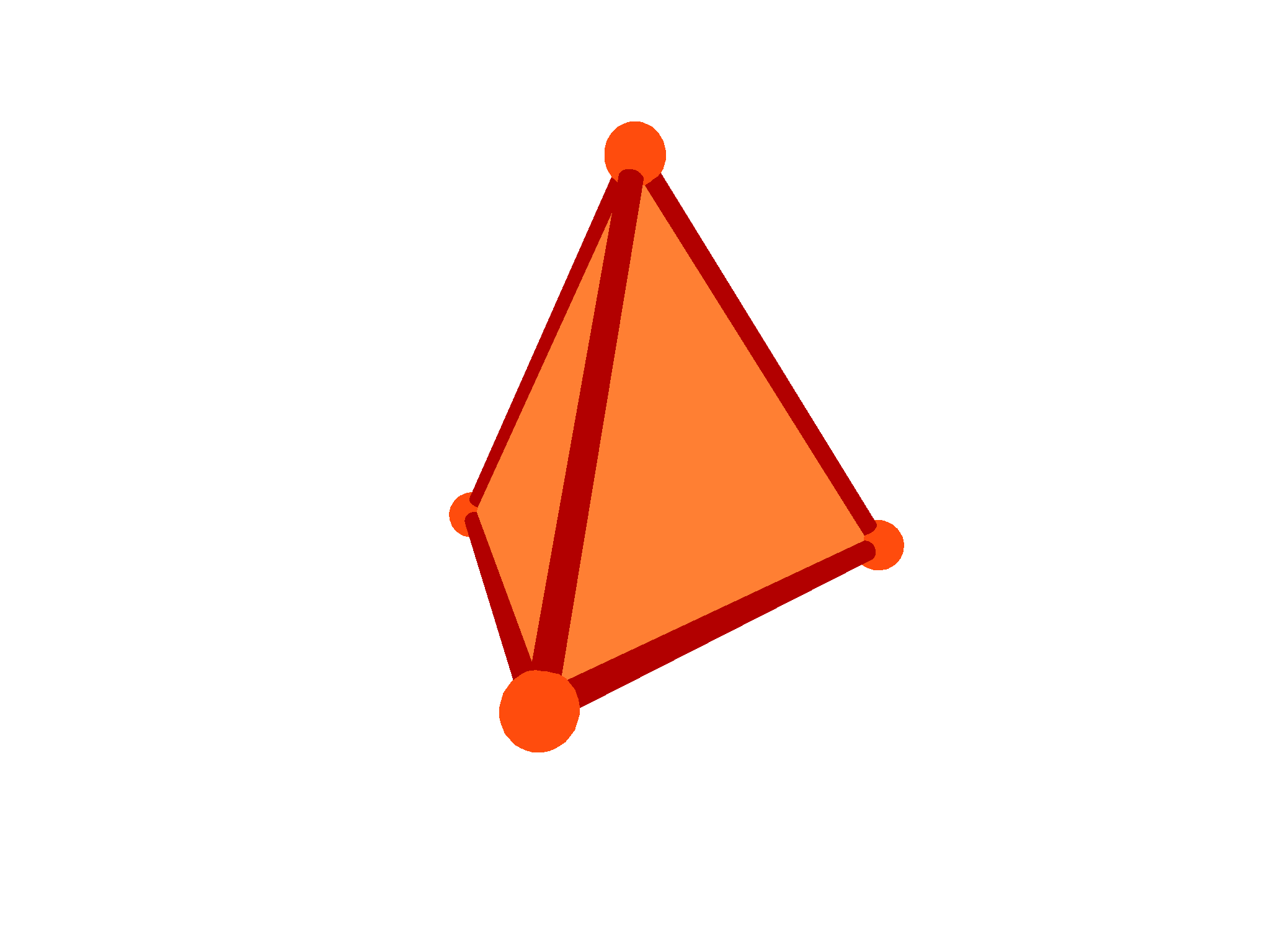
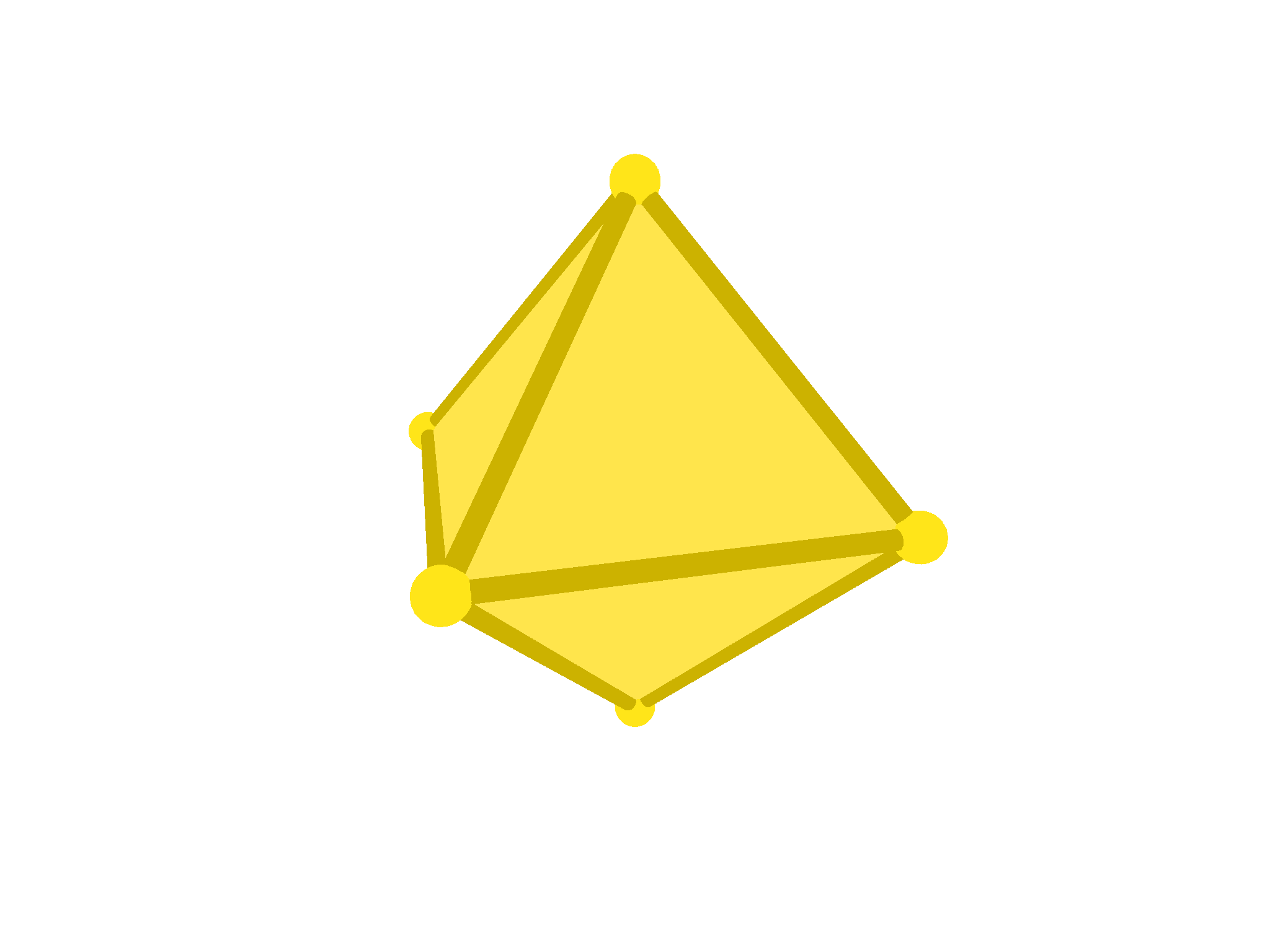
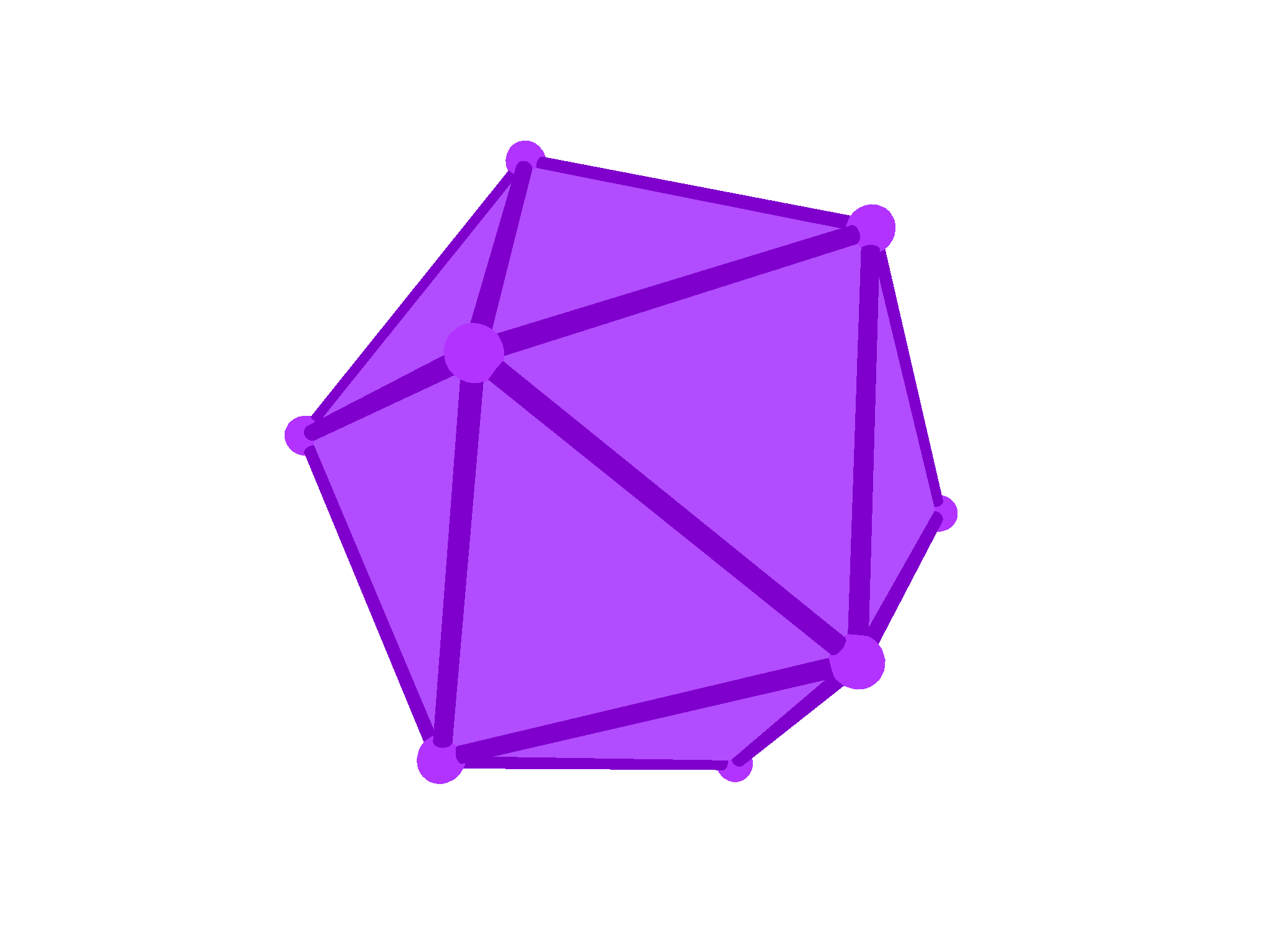
Regular polyhedra are 3d convex shapes built from regular polygons, where each vertex looks the same. There exist exactly five of them: the platonic solids. These are the tetrahedron, cube, octahedron, dodecahedron and the icosahedron respectively.
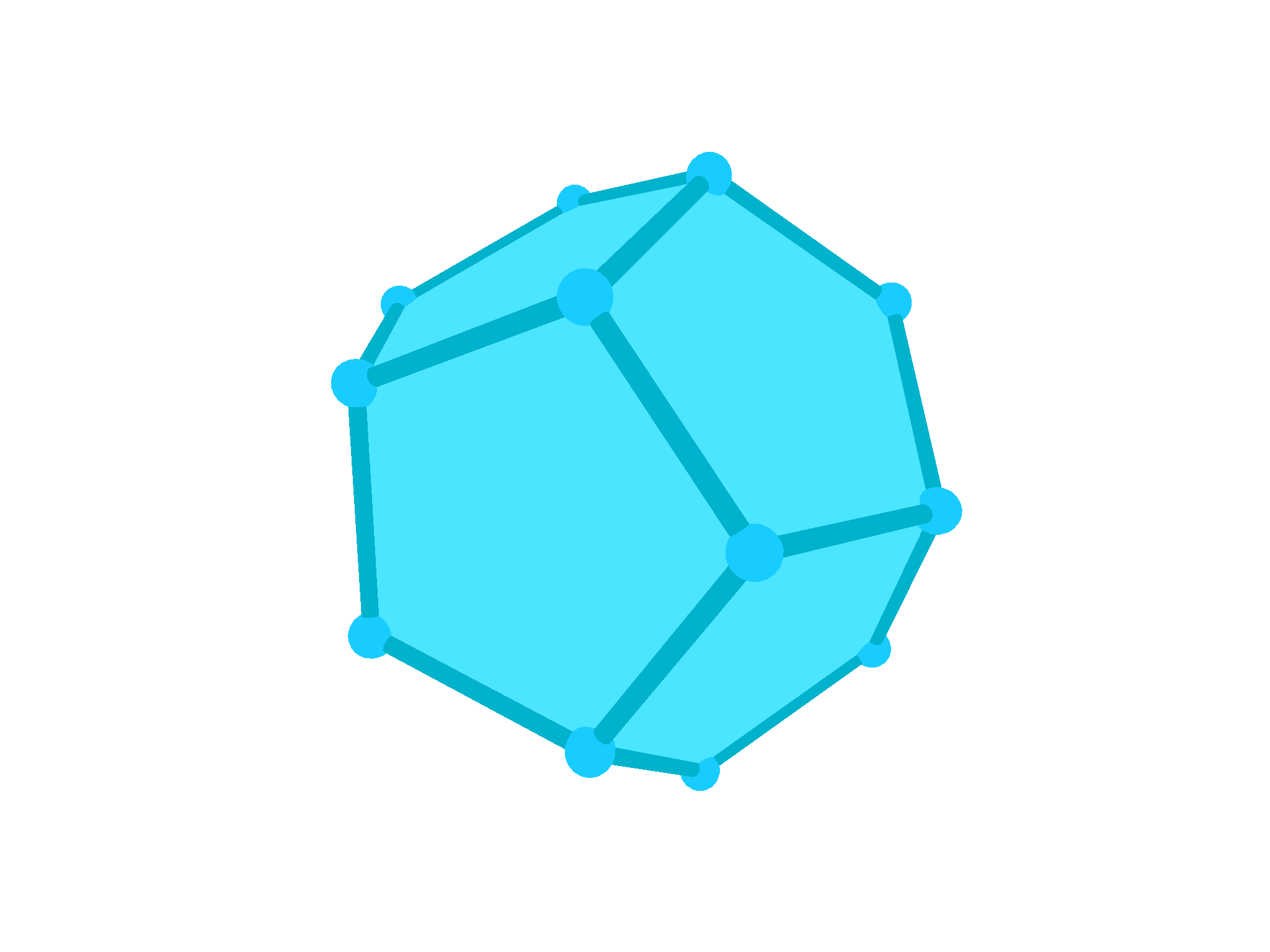
In general, regular polytopes are n-dimensional shapes built from (n-1)-dimensional polytopes, where each vertex looks the same. In 4d space, there exist six regular polychora. Five of them are analoguous to a 3d platonic solid, while one of them is truly unique to four dimensions.
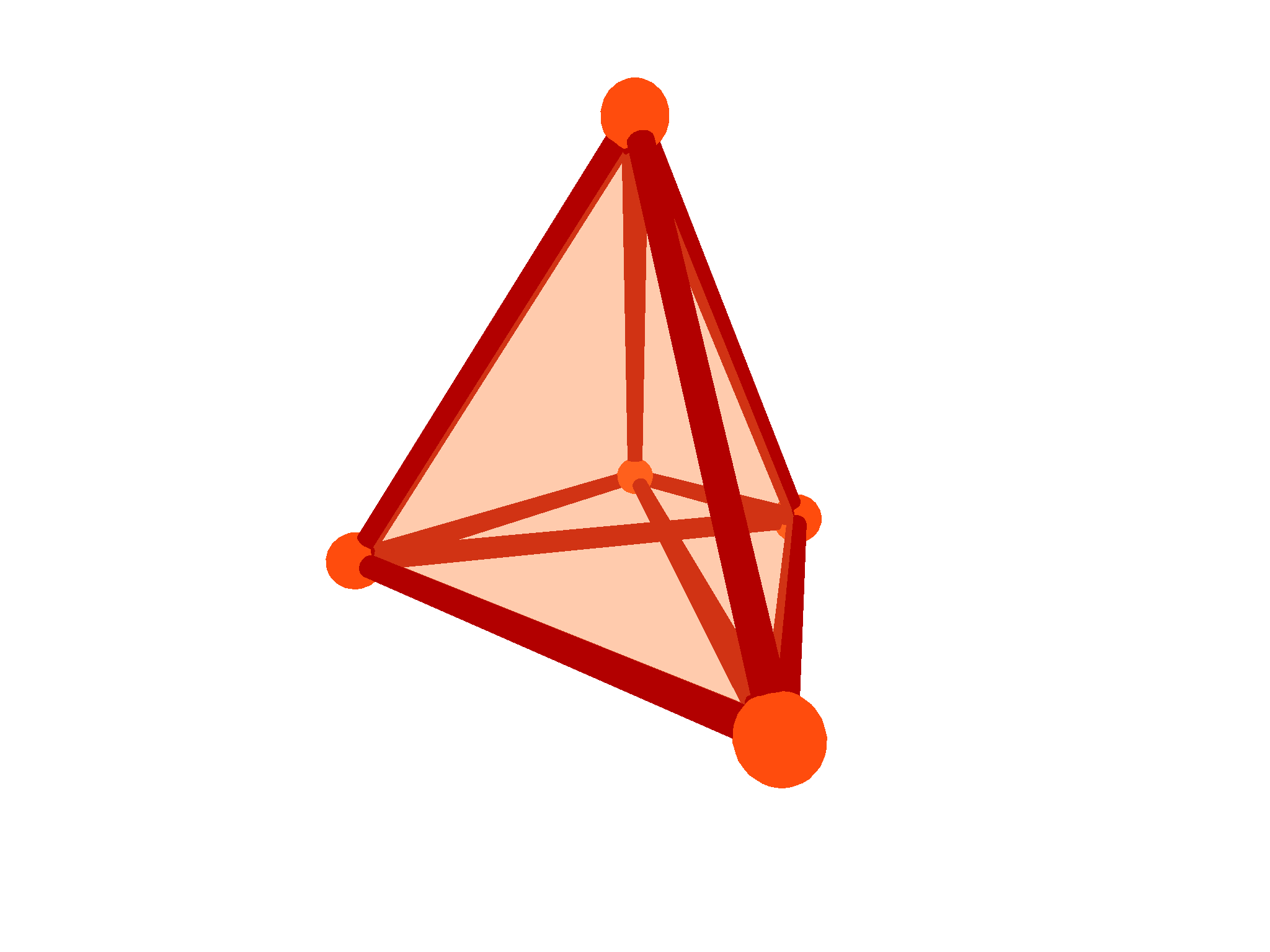
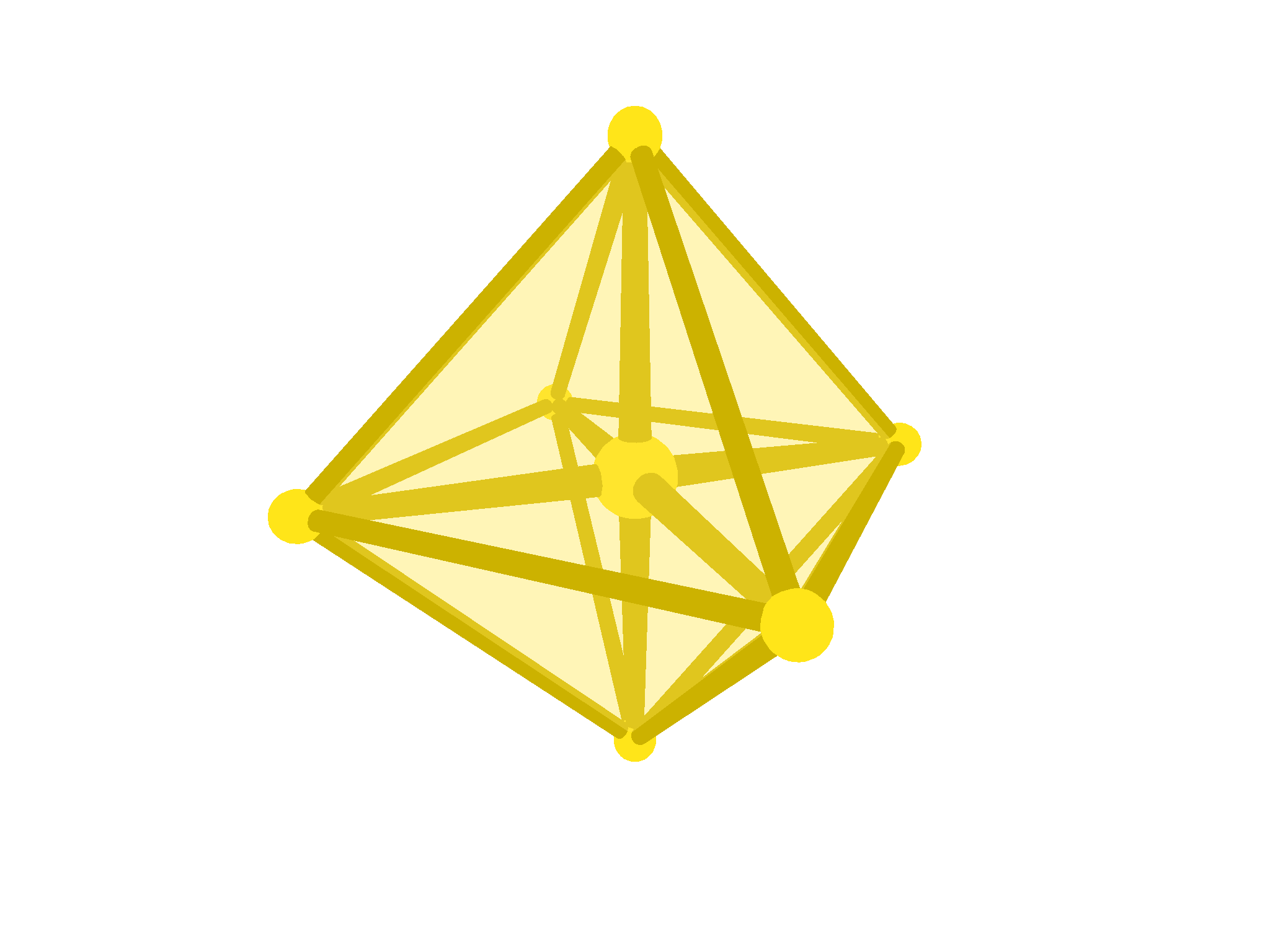
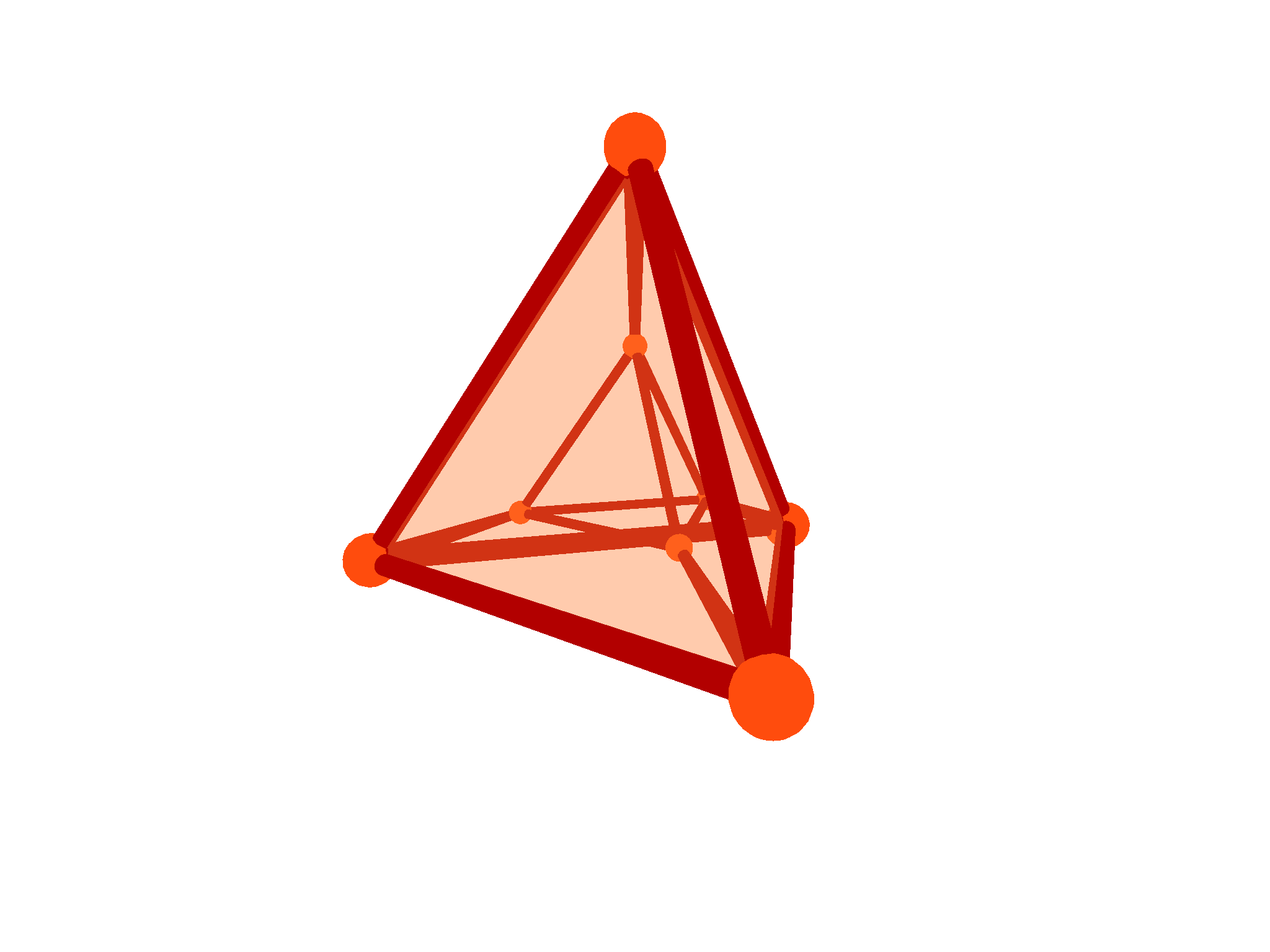
This is the 4d analogue of the tetrahedron and has five tetrahedron-shaped sides, also called cells in 4d space. Furthermore, it can be defined by five equally spaced vertices.
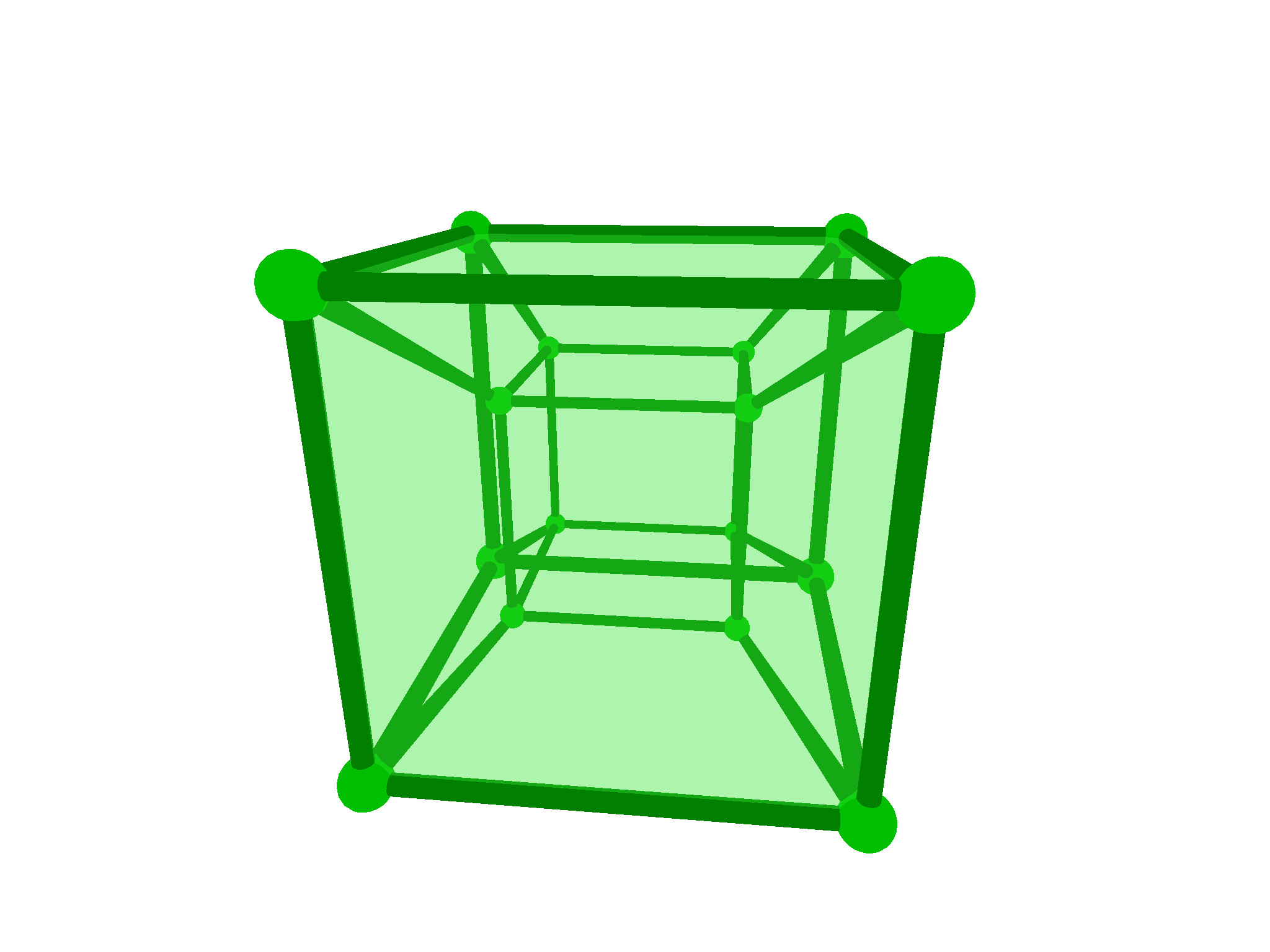
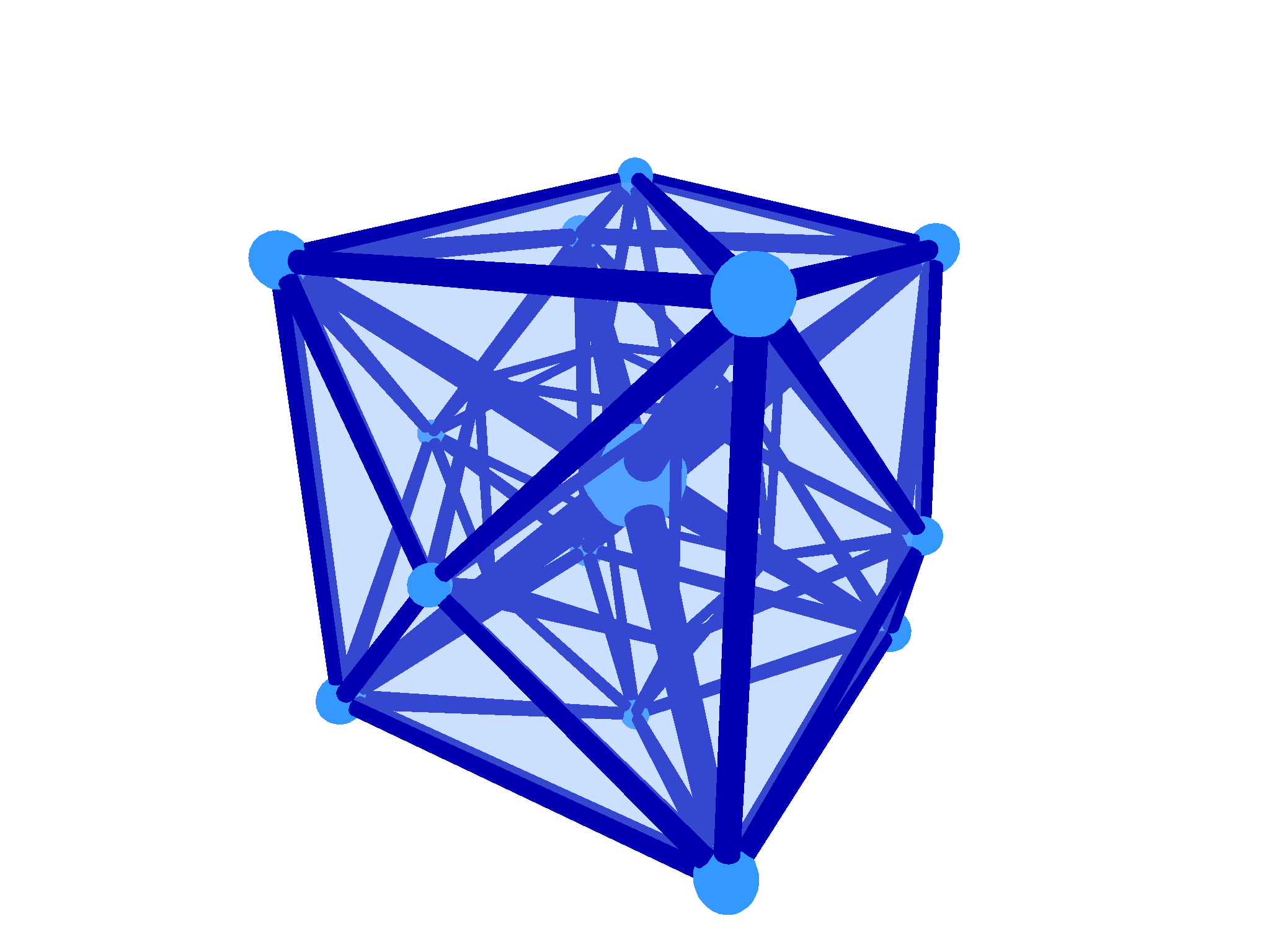
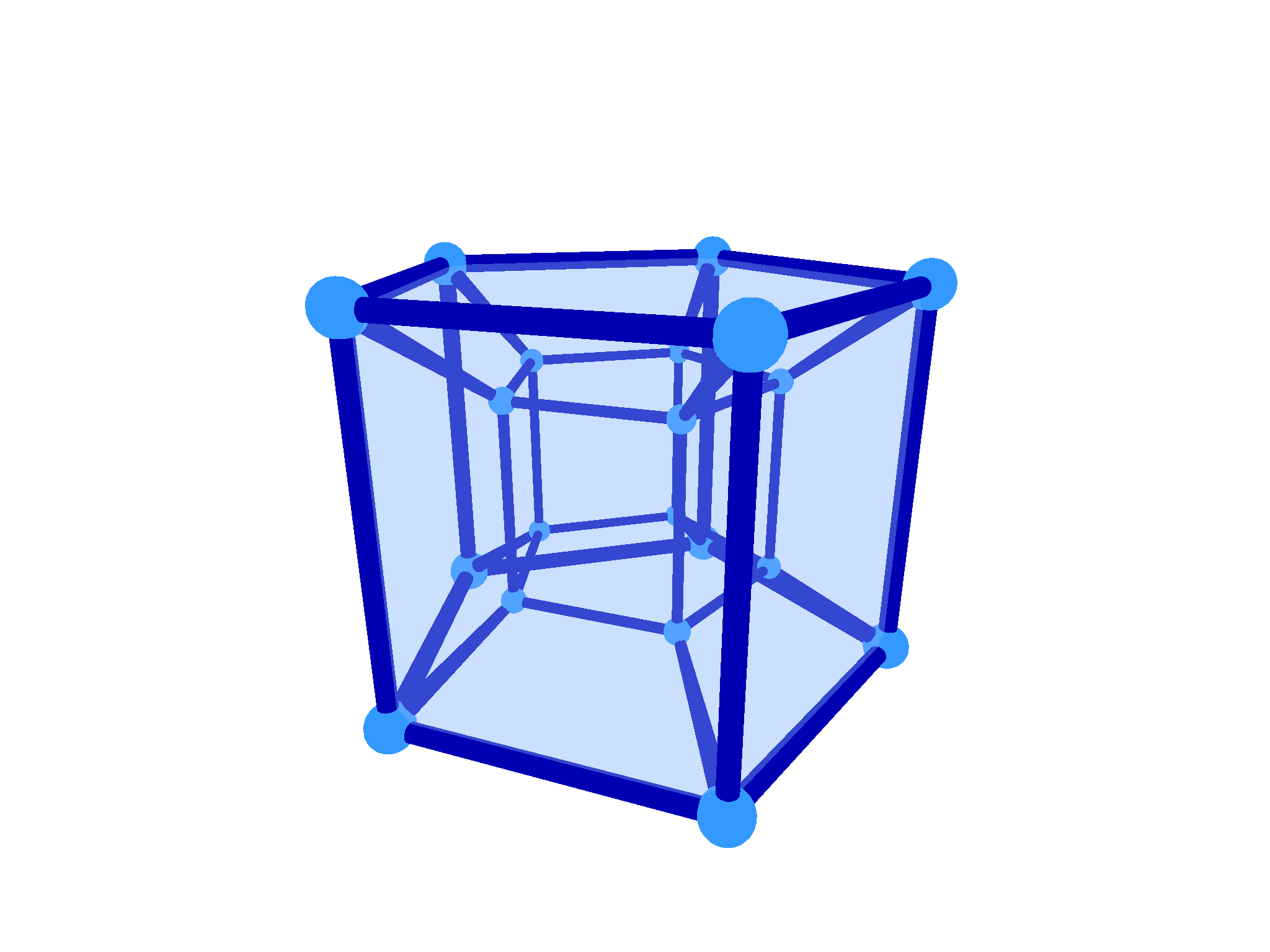
The familiar cube analogue, called the tesseract, has eight cubical cells and sixteen vertices.
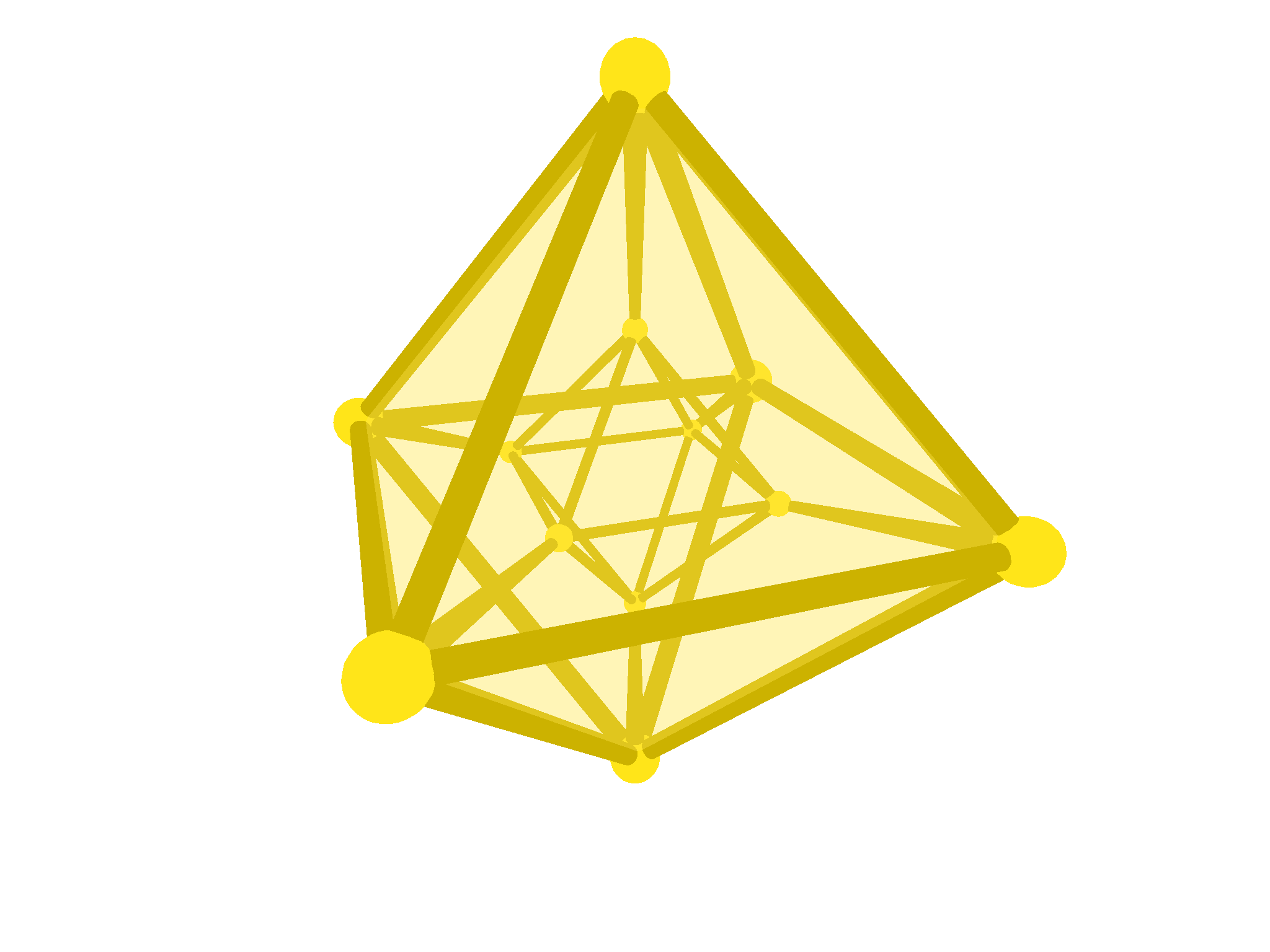
This shape can be thought of as the 4d version of the octahedron, as it is created by joining four tetrahedrons together, similar to the four triangles of the octahedron. It has 16 tetrahedron cells.
Another way to realize this shape is to take the tesseract and replace each cell by a vertex and each vertex by a cell. Doing this operation is also called taking the dual of an object. In case of a cube, taking the dual results in a octahedron. When applying the operation again on the octahedron, we get back the cube.
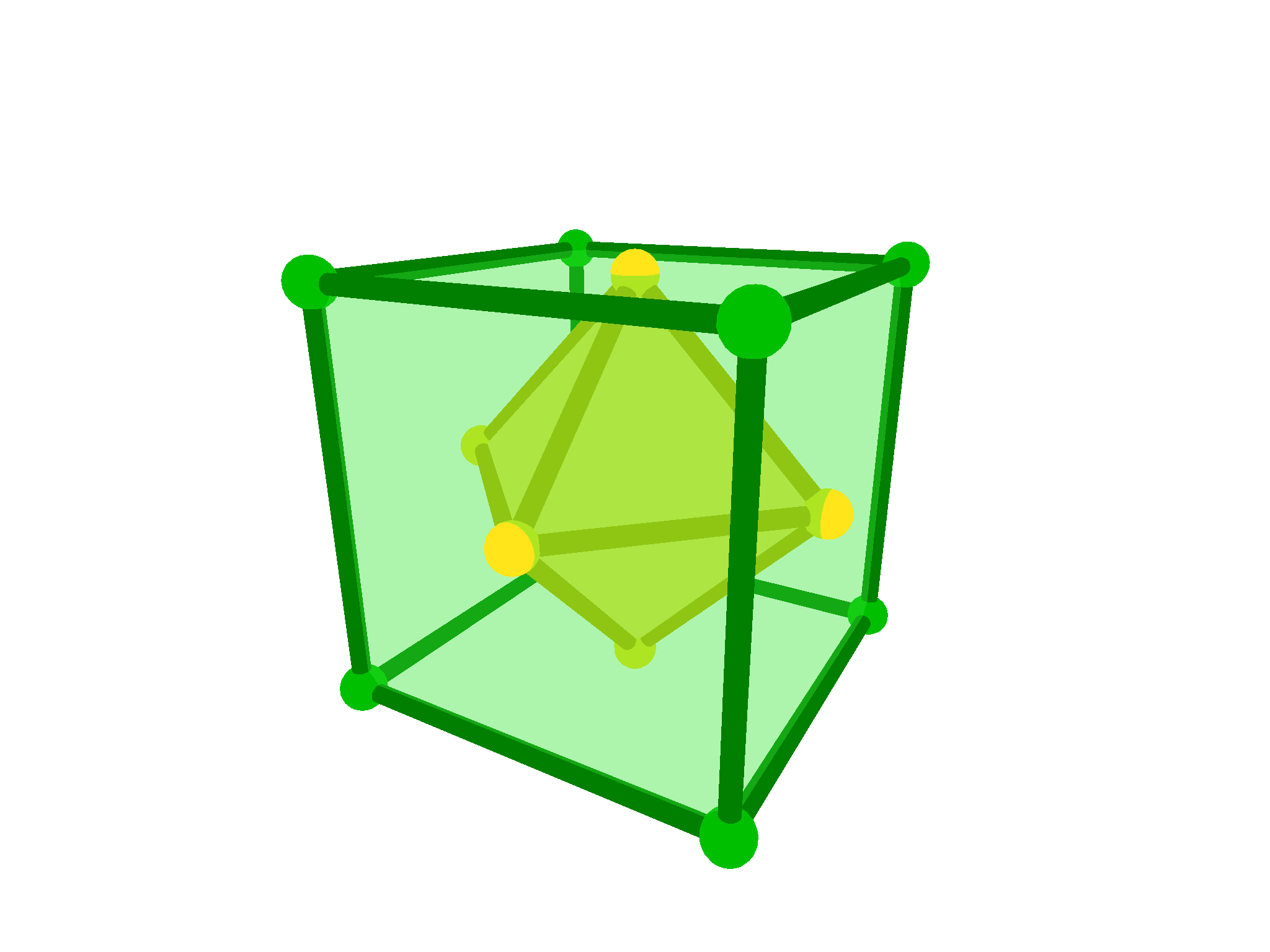
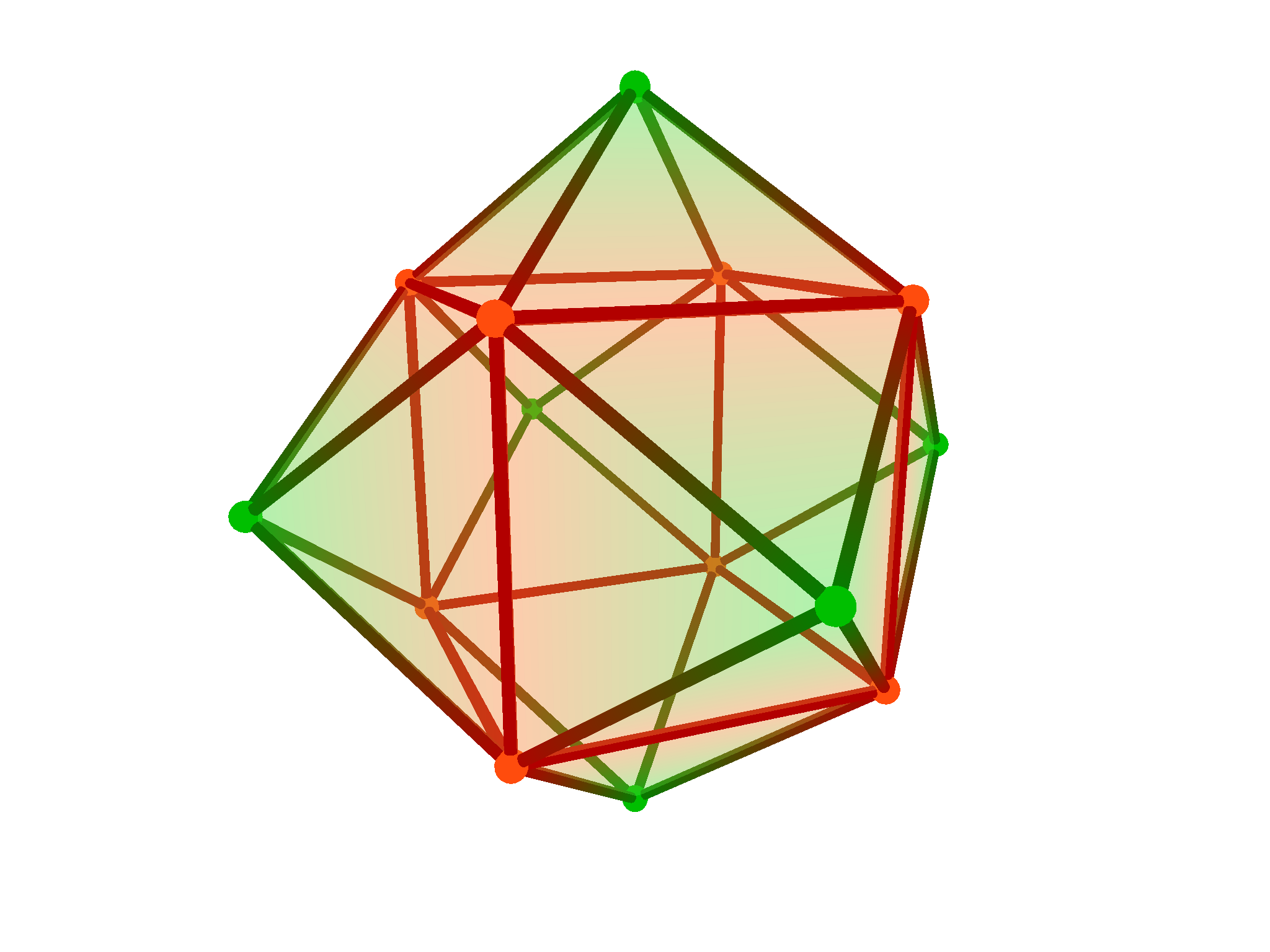
The 24-cell or otherwise called the hyperdiamond is quite special as it is a regular polytope unique to 4d space. This shape has no regular analogue in 3d, but it can be thought of as a tesseract with cubical pyramids attached on all eight sides. The resulting shape, the hyperdiamond, consists of 24 octahedron cells.
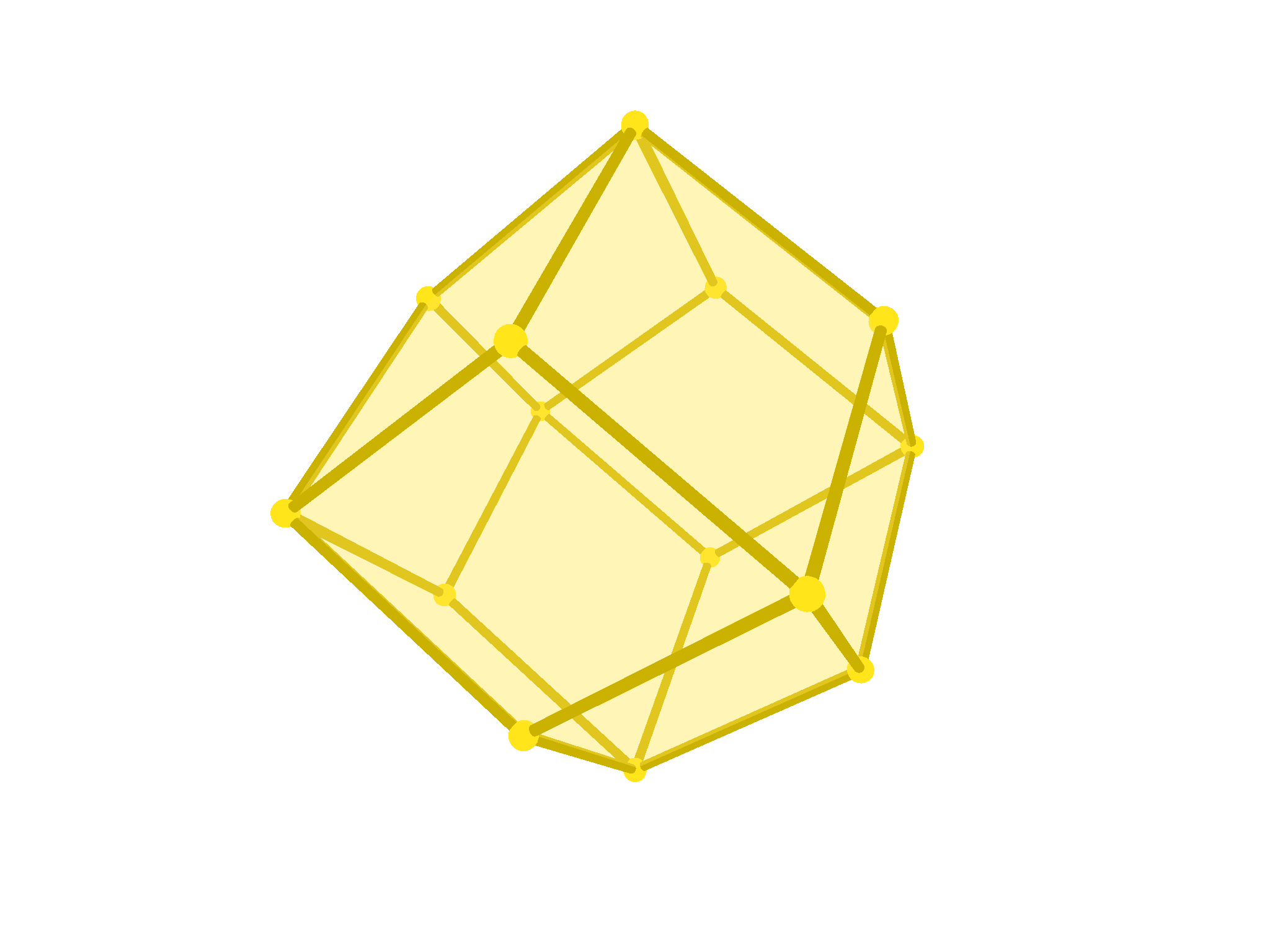
When attaching square pyramids to a cube, we get the 3d analogue: the rhombic dodecahedron. Unfortunately, this shape is not one of the platonic solids as its faces are not regular polygons.
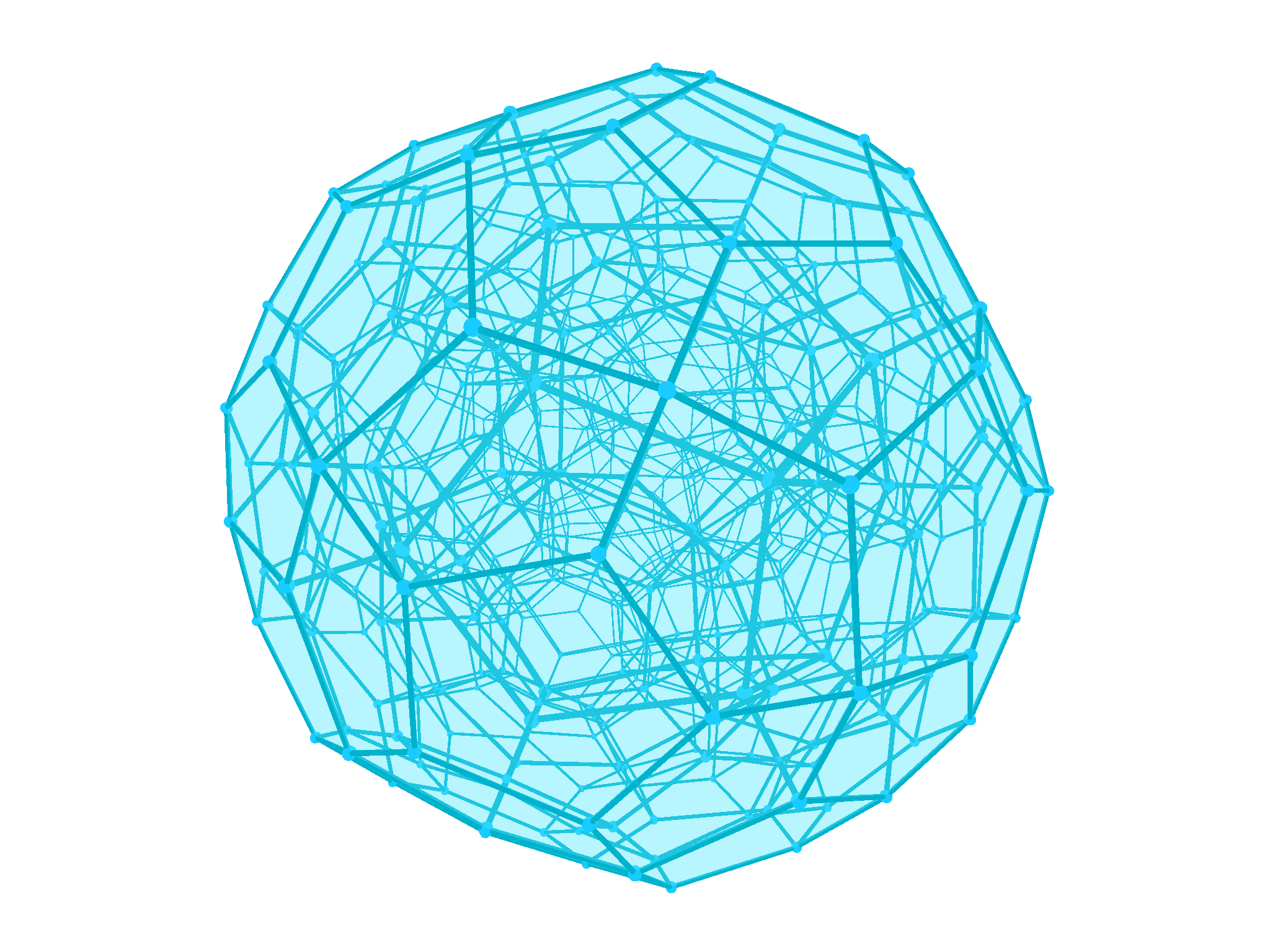
This shape is really quite complex as it consists of 120 dodecahedrons!
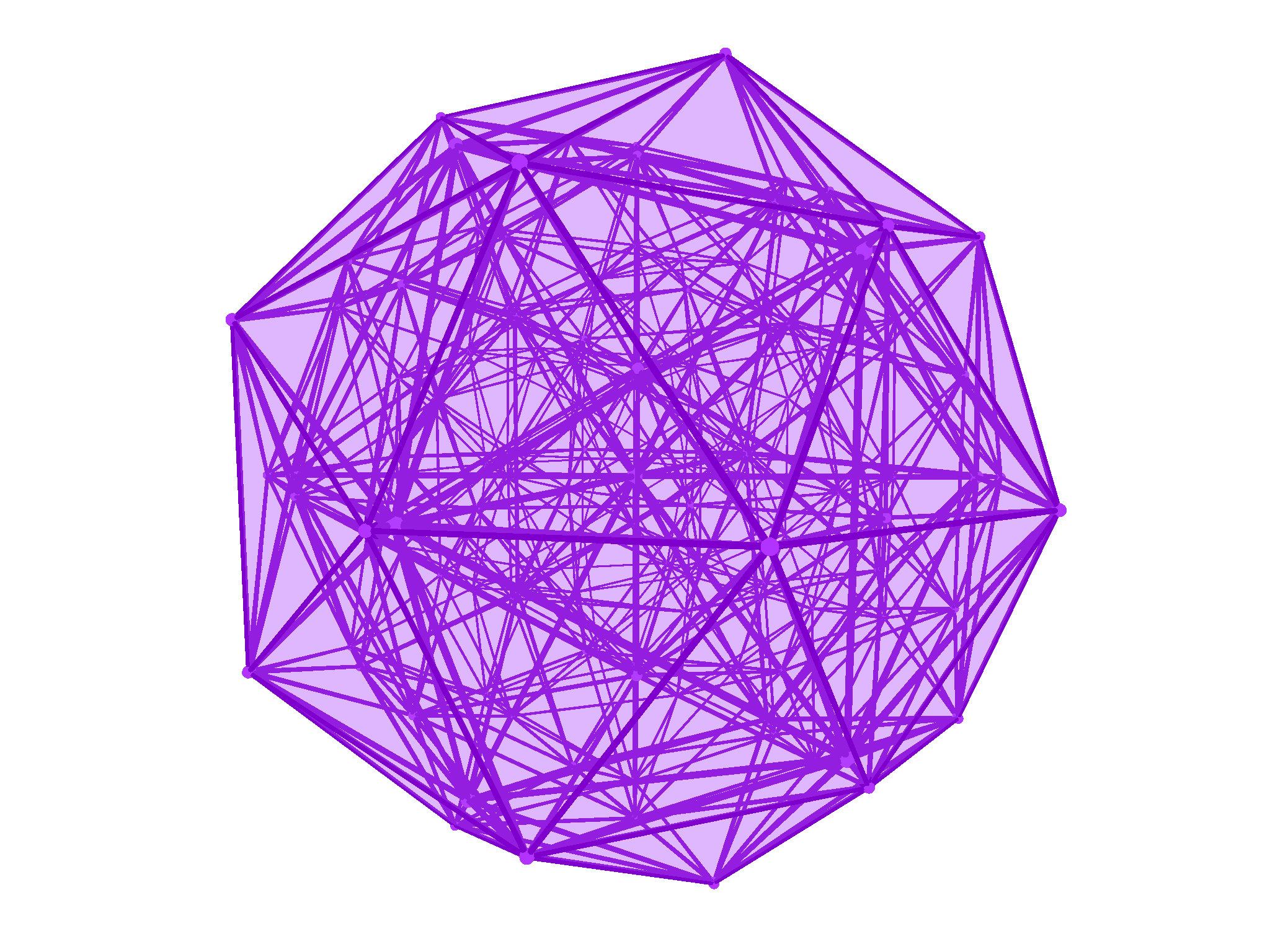
This shape is the 4d equivalent of the icosahedron, with five tetrahedrons around an edge. It has 600 tetrahedron cells and is the dual of the 120-cell.
The 600-cell has many cells, because the gap formed by attaching five tetrahedrons to eachother is very small, meaning these five tetrahedrons do not curve much at all into the fourth dimension.
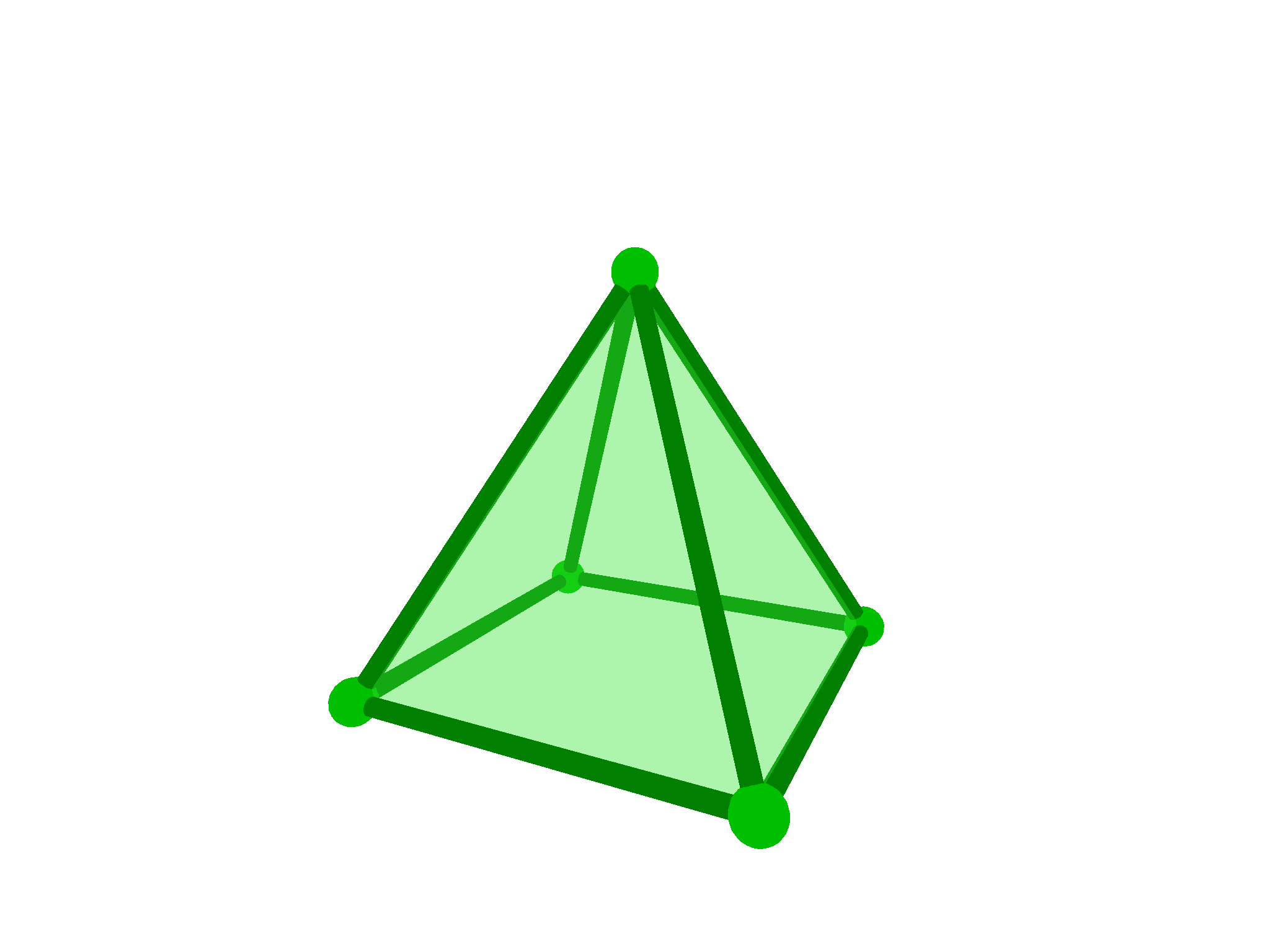
Analoguous to 3d pyramids, a 4d pyramid has a base 3d shape, forming the bottom surface, which tapers off to the top. This can be any 3d shape, such as a cube or a dodecahedron. The following are perspective projections of these pyramids, looking straight down at the apex:
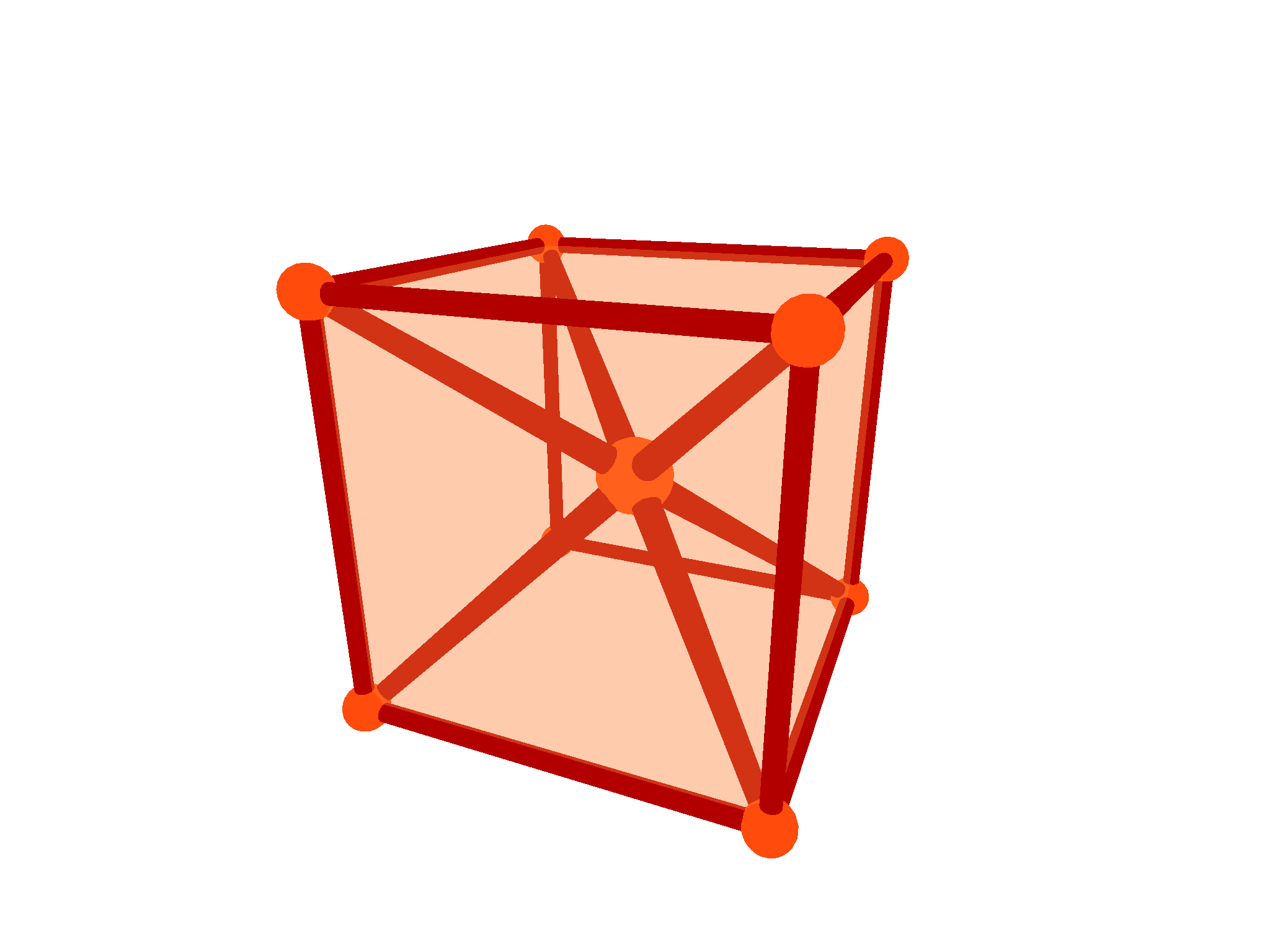
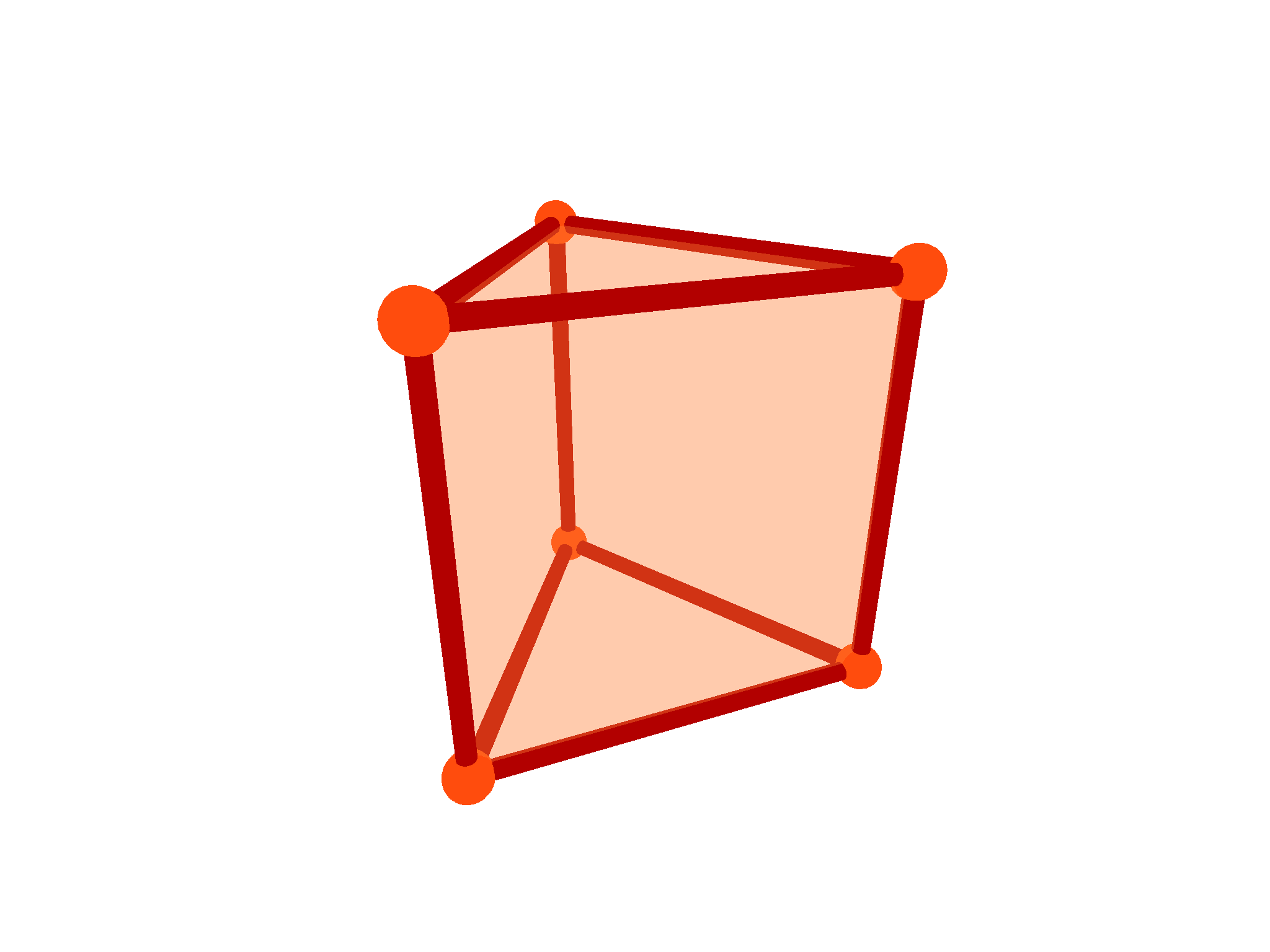
In 4d, we can also have prisms. These will again have any 3d shape as their base, but this time extruding up to the top instead of tapering off. Here are some example projections, again looking straight down:
This last prism can be thought of a prism with a pentagonal prism as its base. But since we have an extra dimension to work with, we can actually create a whole new family of prisms, called duoprisms. Instead of extruding a 3d shape in a line across the fourth dimension, we can also 'extrude' a 2d shape over two dimensions, using another 2d shape as a template. The resulting shape will then be all the points with XY coordinates described by the first shape and ZW coordinates described by the second shape. So, for every point (X,Y) in the first shape, the point (Z,W) in the second shape defines a point (X,Y,Z,W) that is part of the duoprism. Pairing up each point in the first shape with each point in the second, forming a new set of points, is also called taking the cartesian product in mathematics. Extruding the pentagon in the third dimension and then extruding that prism into the fourth is the same as taking the cartesian product of a pentagon and a square. The product of two regular polygons with m and n sides respectively, is called an m,n-duoprism. So in the case of the last prism above, its called a 4,5-duoprism.
Using this concept of the cartesian product, we can also say that a 3d prism is the cartesian product of a 2d shape with a 1d line segment, and we can extend this to higher dimensions too: the product of a 2d shape and a 3d shape forms a 5d shape.
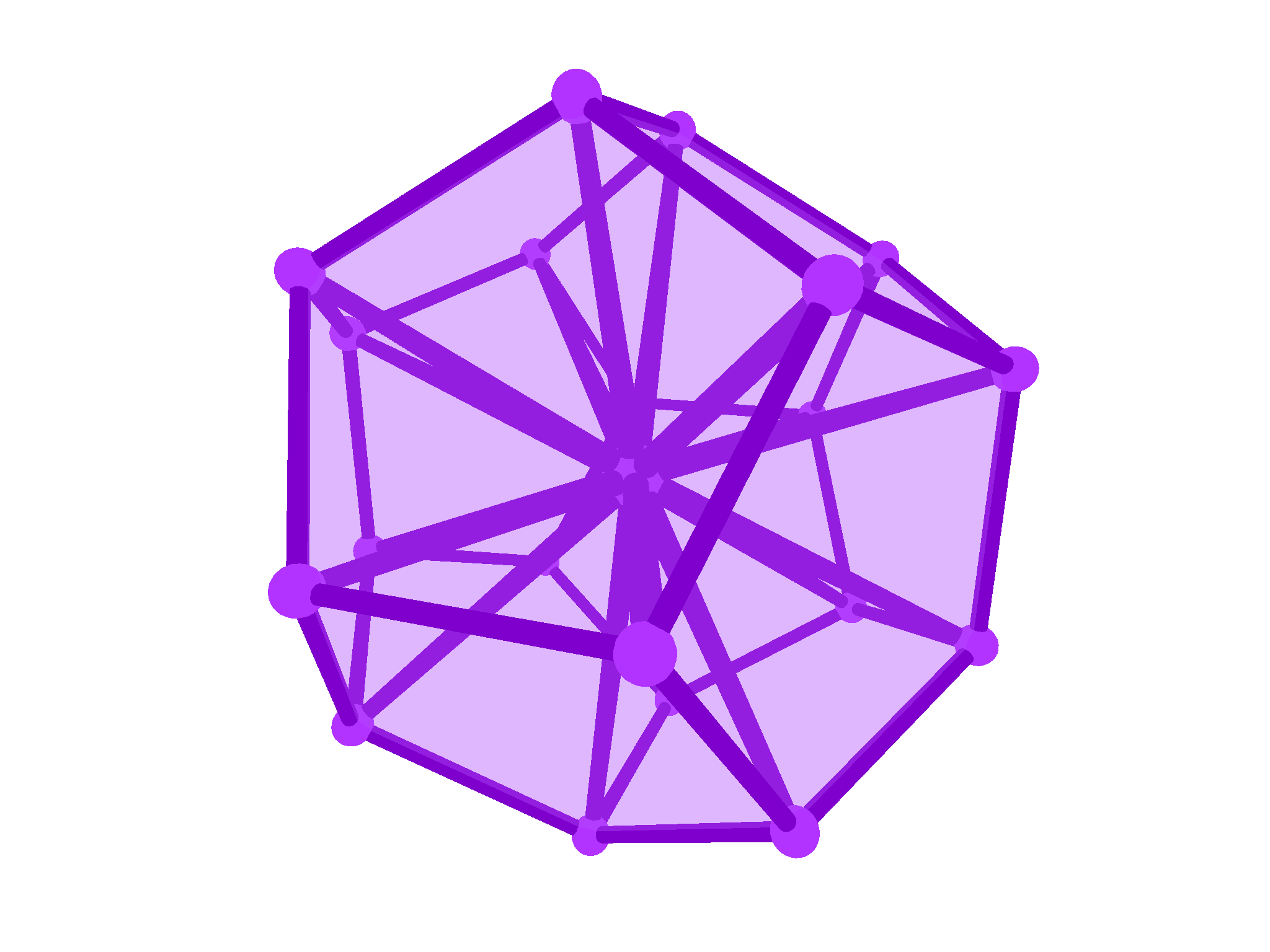
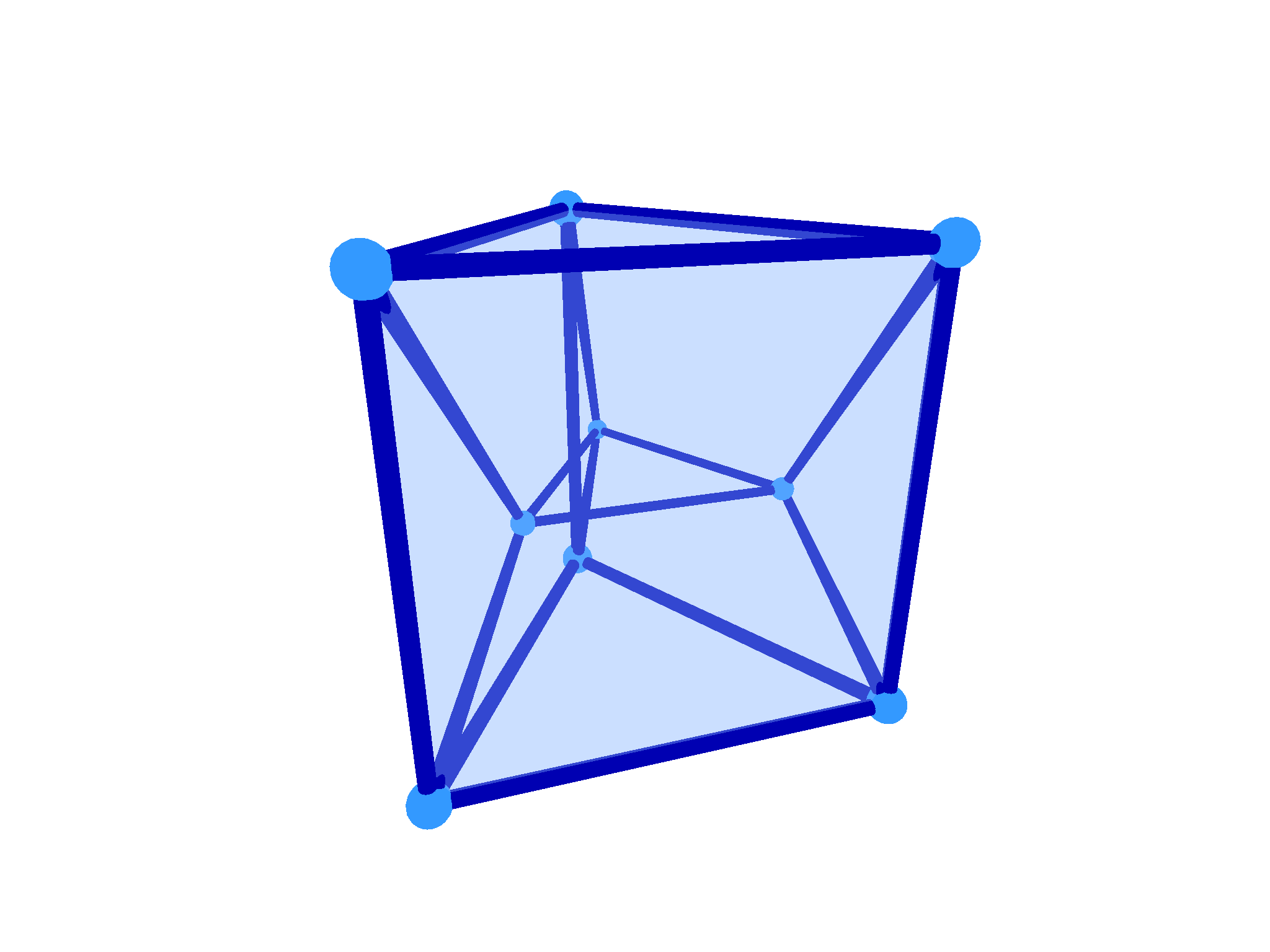
Here is an example of the product of two triangles, a 3,3-duoprism. It consists of two rings of three triangular prism cells, for a total of six cells.
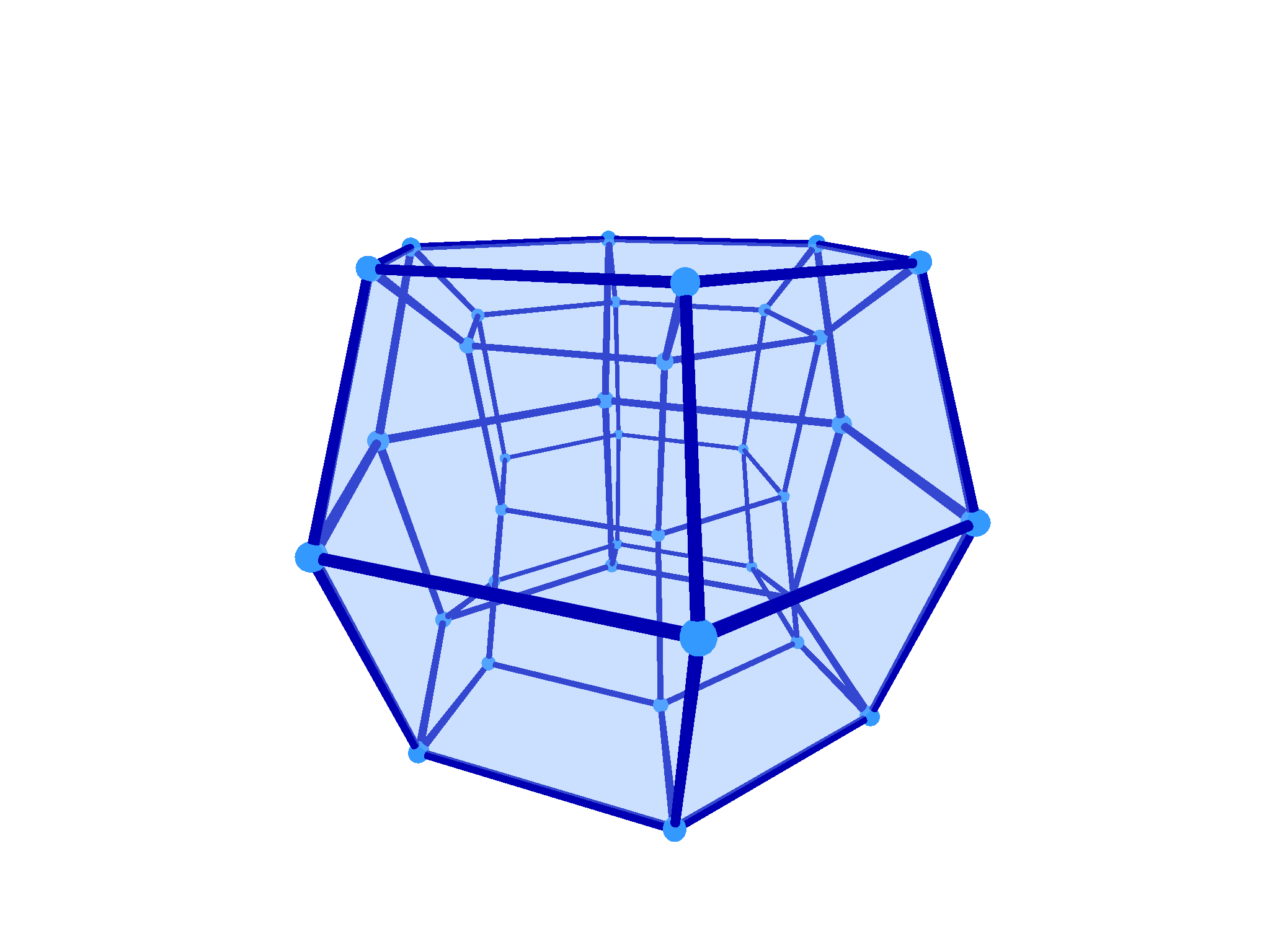
And this is what a 6,6-duoprism looks like, a shape with twelve hexagonal prism cells:
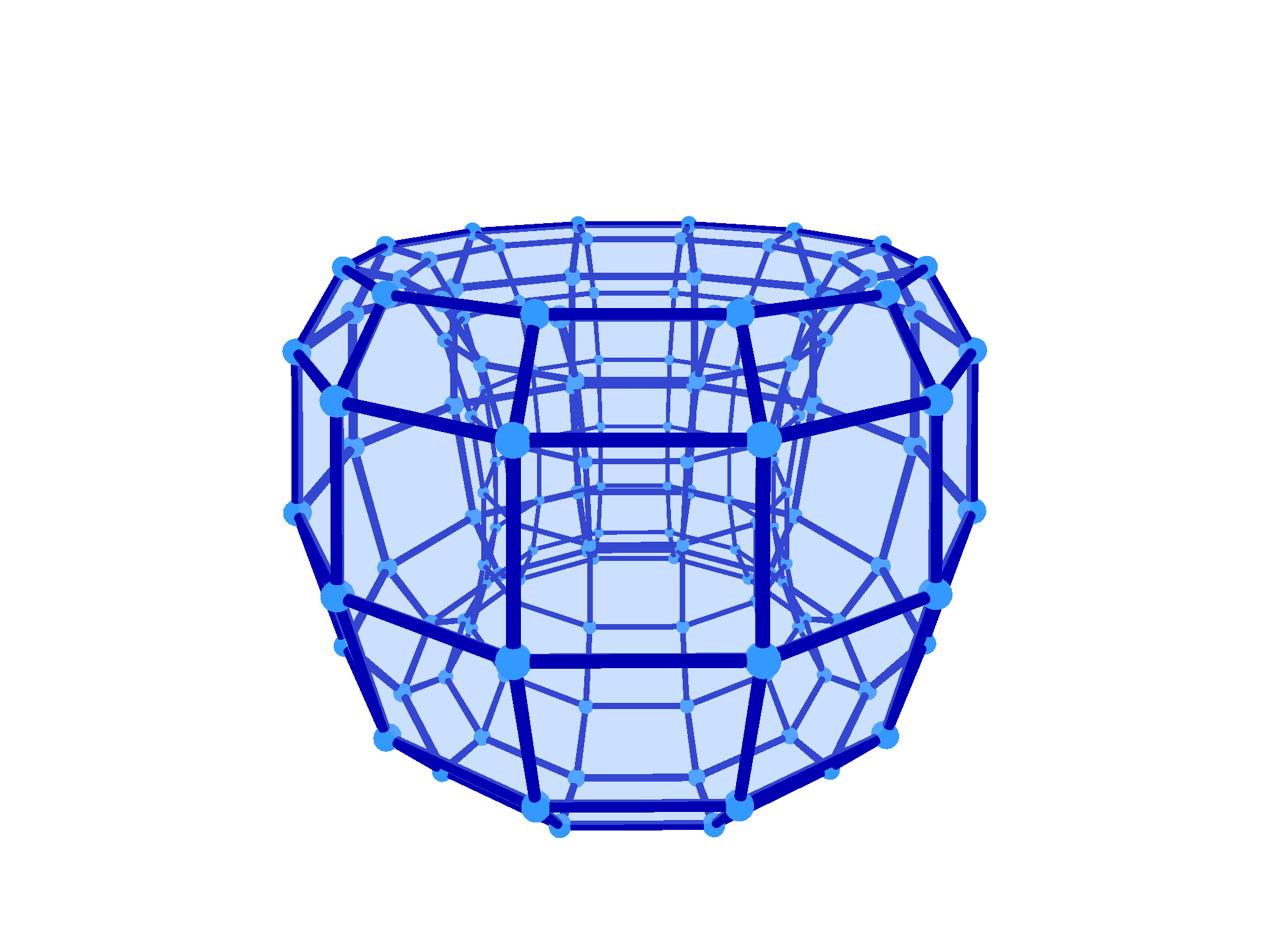
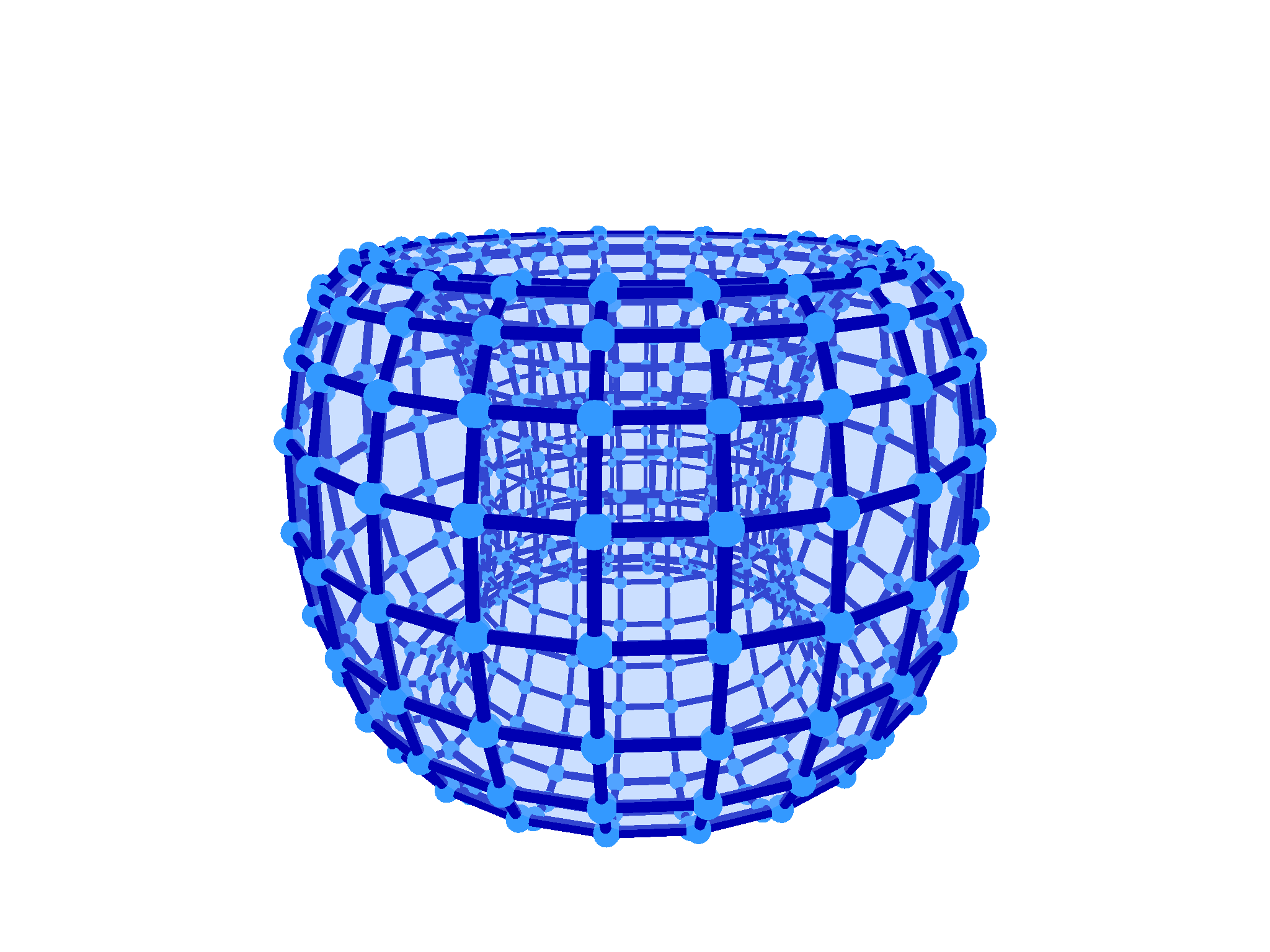
If we continue this pattern of a n,n-duoprism, with higher and higher values of n, we approximate the duocylinder. This is the cartesian product of two circles, which can be described by the following equations:
x² + y² ≤ r²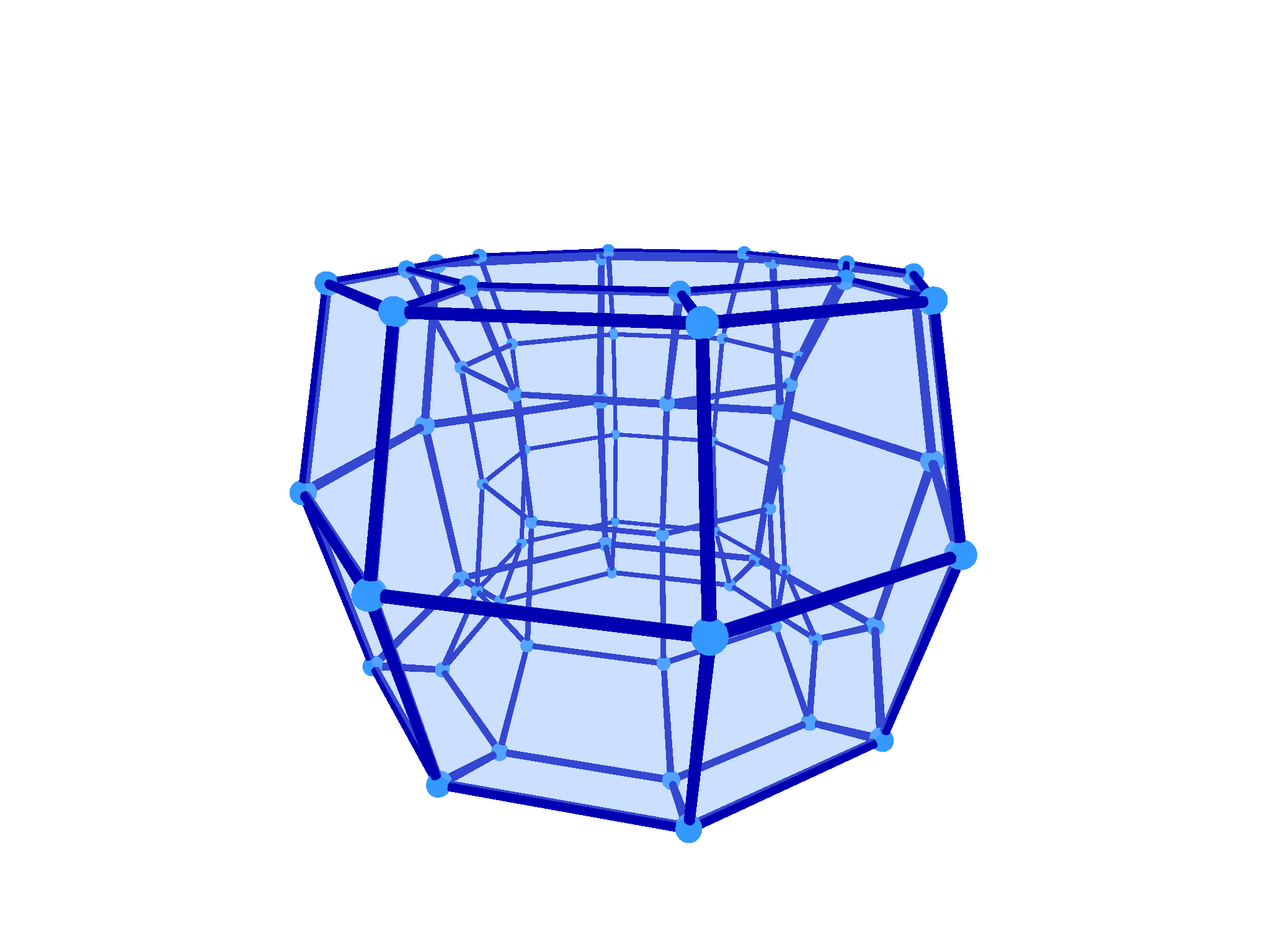
These are some links to some wonderful pages about four dimensional space made by other people on the internet.